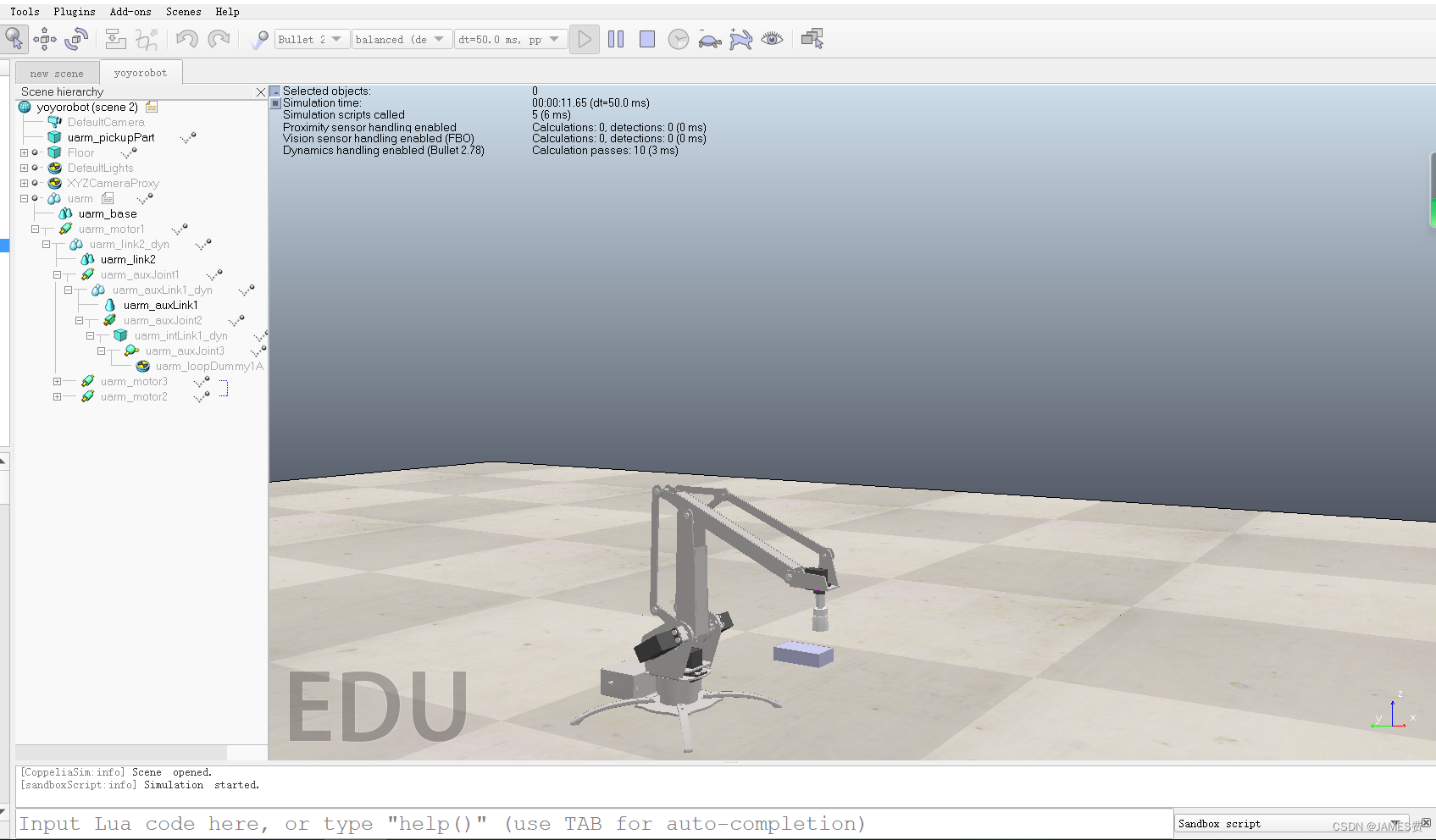
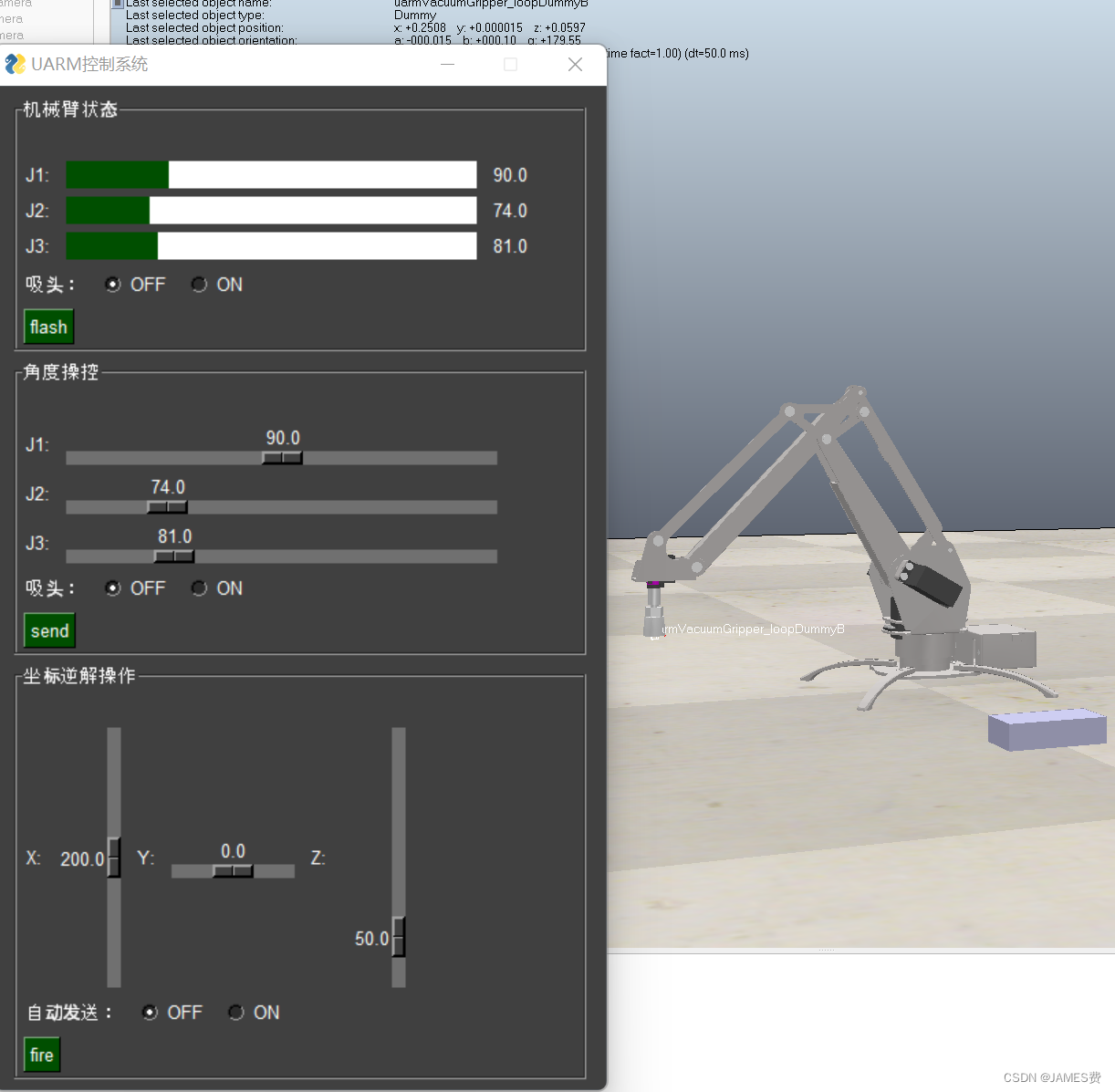
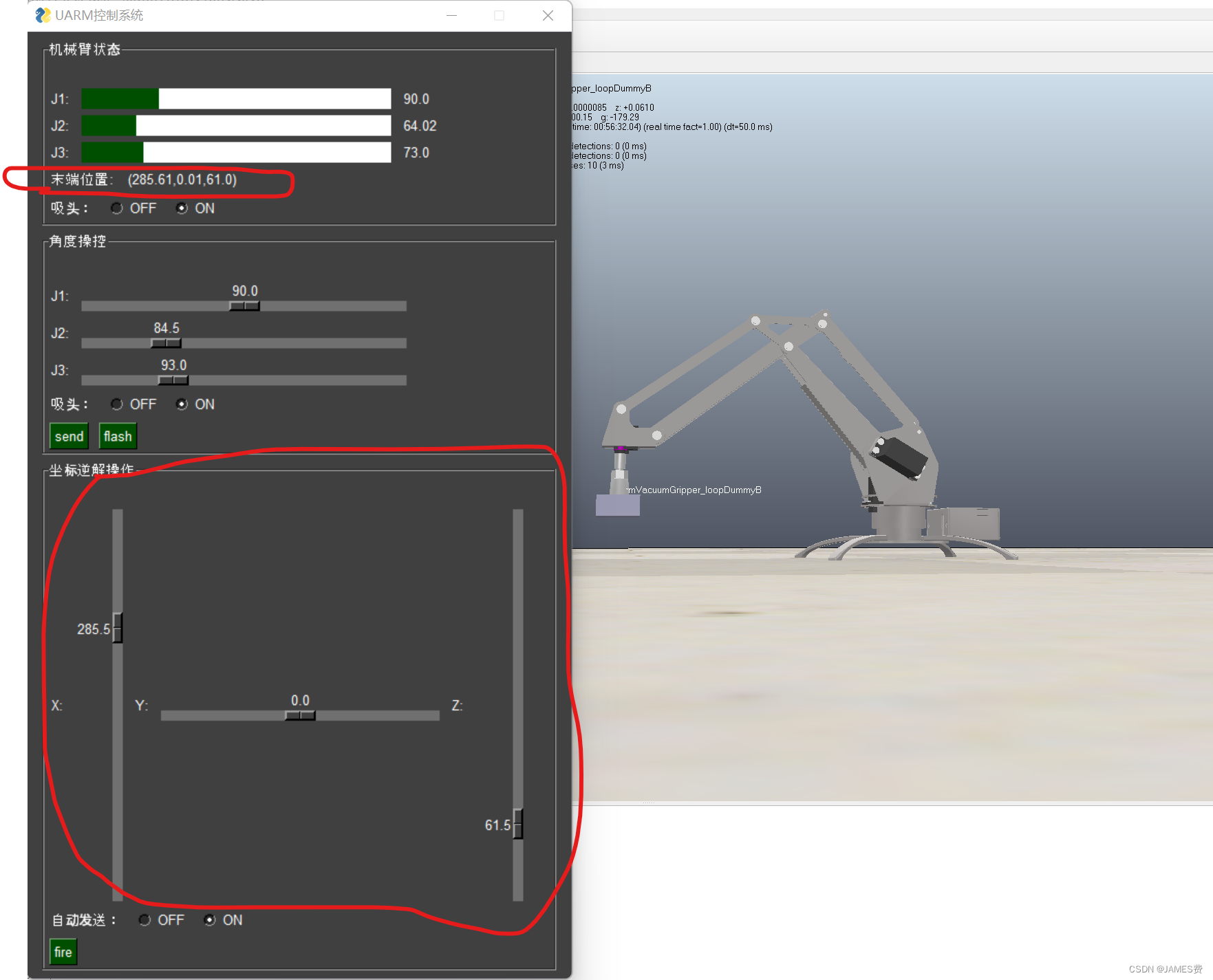
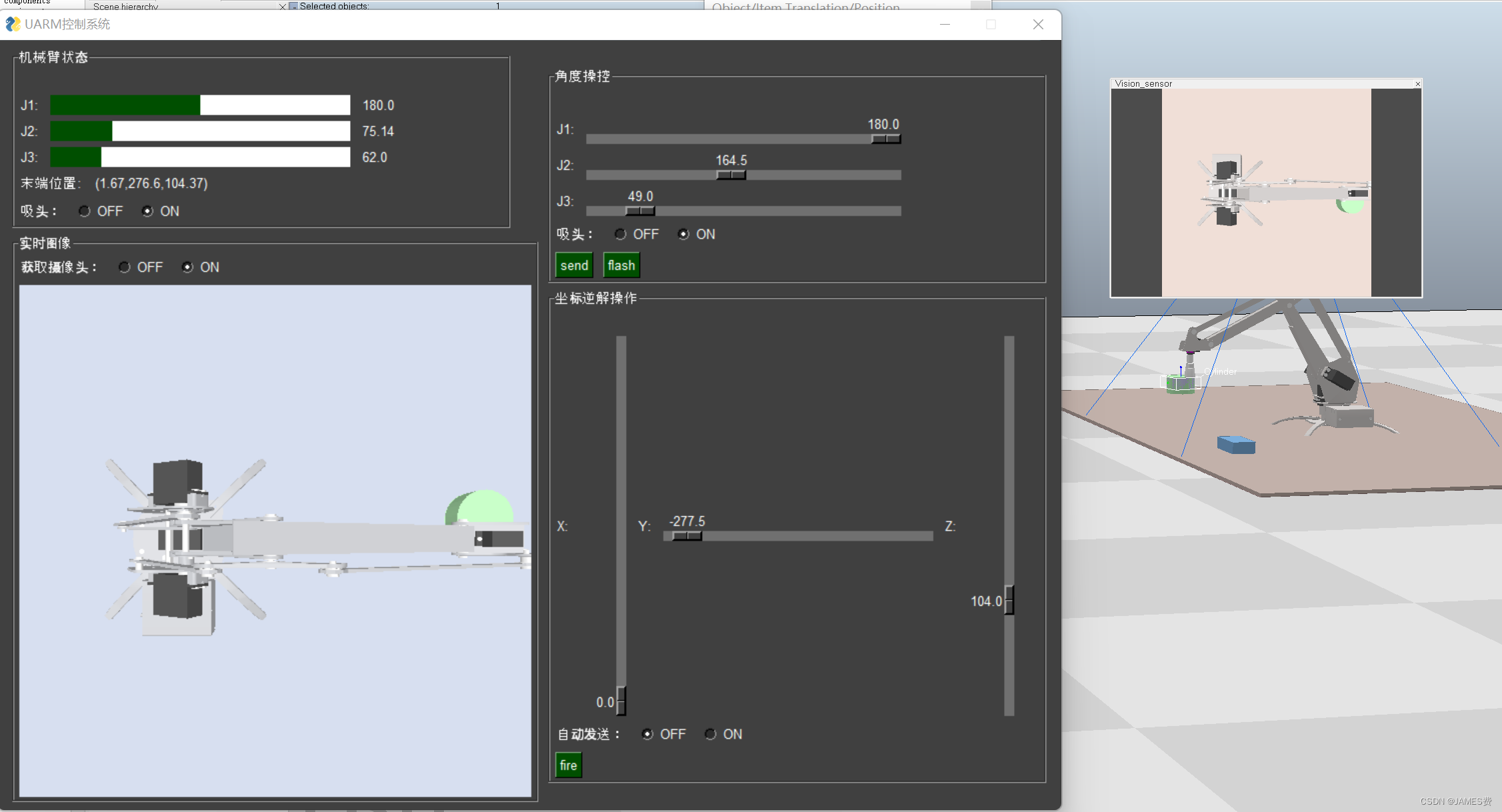
可以看出,经过笔者的多次试验调试,算法达到了比较小的精度,需要目标坐标经过坐标逆解发送控制角度到vrep机械臂,执行后返回末端位置,(x,y,z)数值基本是一致的,想了解中间调节的细节的网友,可以留言交流。
PS**关注公众号届时发放源码。
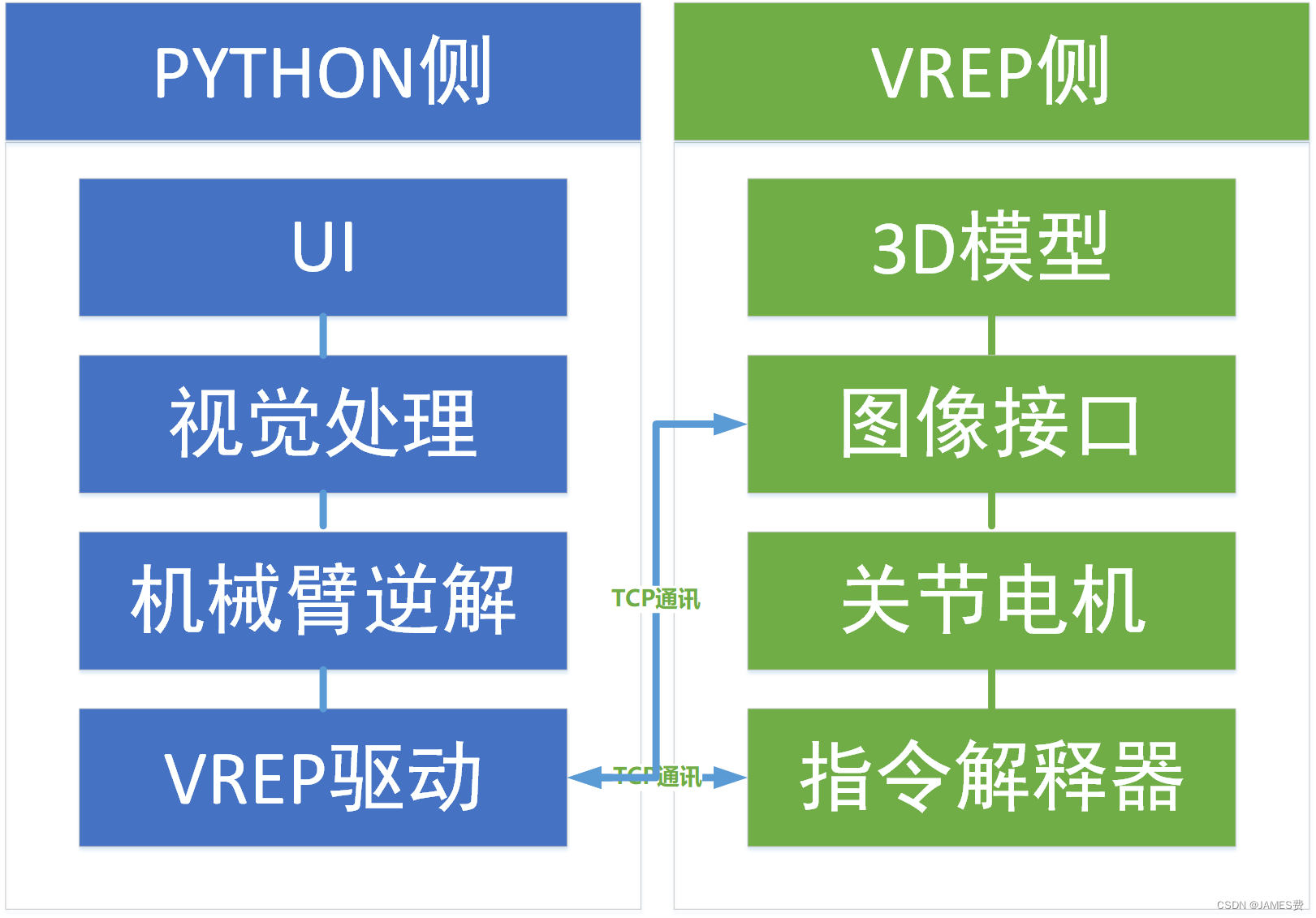
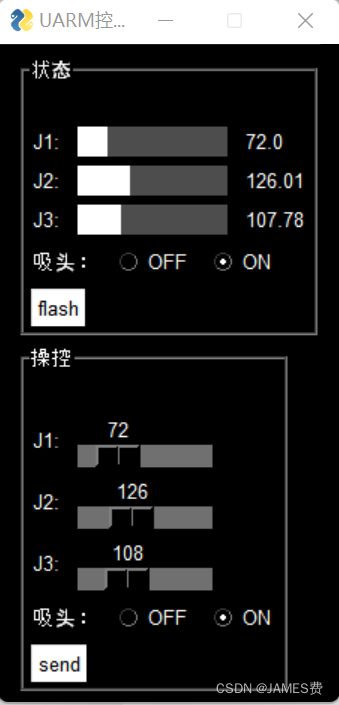
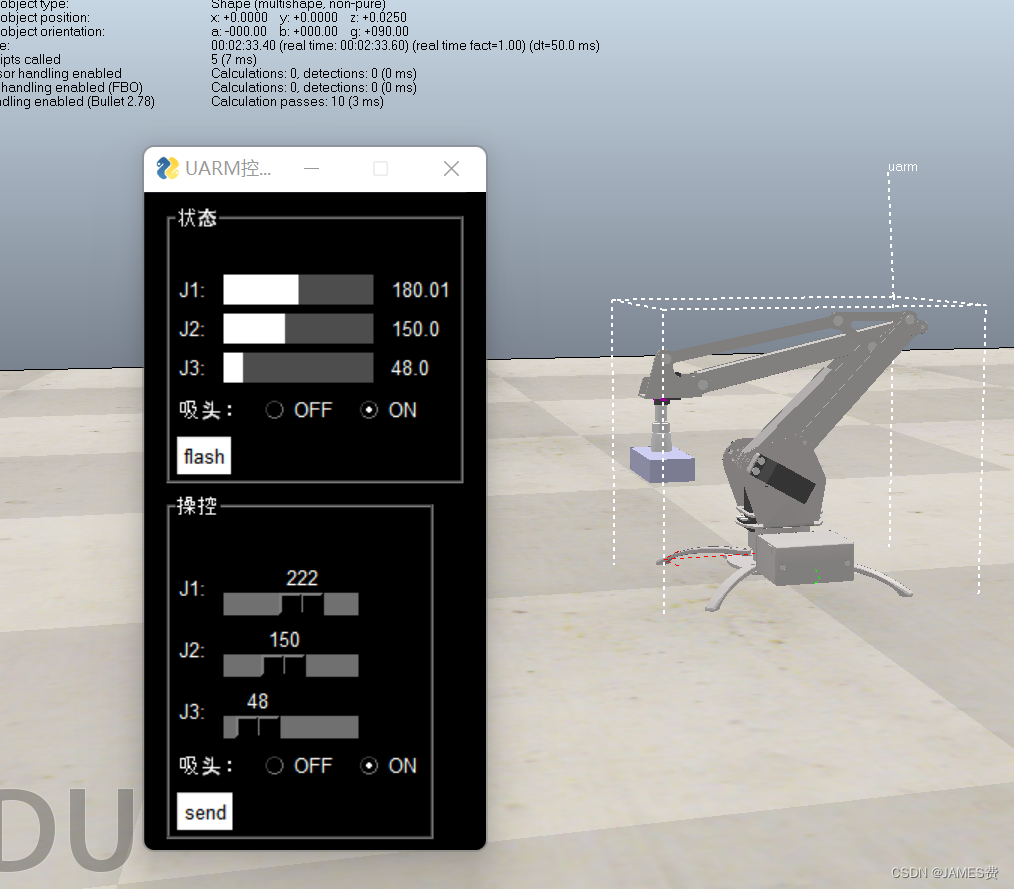
V-R
EP仿真Python控制
机械臂和rg2夹爪
本论文转自(作者:lanlande):
V-r
ep机器人仿真(Win10):UR5+RG2+Kinect+YOLOV3+DDPG+Pytorch(第三部分:在V-r
ep中用
python控制
机械臂)
通过键盘按键控制v-r
ep中ur
机械臂和夹爪
#-*- coding:utf-8 -*-
keyboard Instructions:
robot moving velocity: <=5(advise)
Q,W: joint 0
包括ddpg、ppo、sac、td3、trop等多种算法流程代码;
包括:基于pybullet和,metagym搭建好的四足机器人模型使用sac和ppo算法训练数据集
包括:测试数据结果
运行前先配置python环境,并修改所有.py文件中的涉及的路径path.append(r'C:\Users\\机器人')
文章目录前言vrep是什么?学习vrep的正确姿势是什么?
VREP是一款优秀的机器人仿真软件,相比于其他仿真软件,它功能强大,仿真度高,操作便利。
奈何这款优秀的仿真软件知名度不高,知道的研究人员很少,相关资料就更少了,让很多人上手困难。
笔者作为国内第一批使用VREP的研究人员,我用课余时间做一些VREP技术的分享,并形成一个系统,由简入深的,实用性强的系列教程。
vrep是什么?
vr...
V-r
ep是一款
机器人仿真软件,可以验证
机器人正逆运动学,动力学,轨迹规划,路径规划等。但是其界面是英文版本的,
编程语言是
Lua语言,对于一些刚结束
机器人学的新人而言十分不友好。本篇博客主要对其界面的英文和一些脚本解释。
软件界面的英文翻译
motor properties 电机特性
Target velocity 目标速度
Maximum torque 最