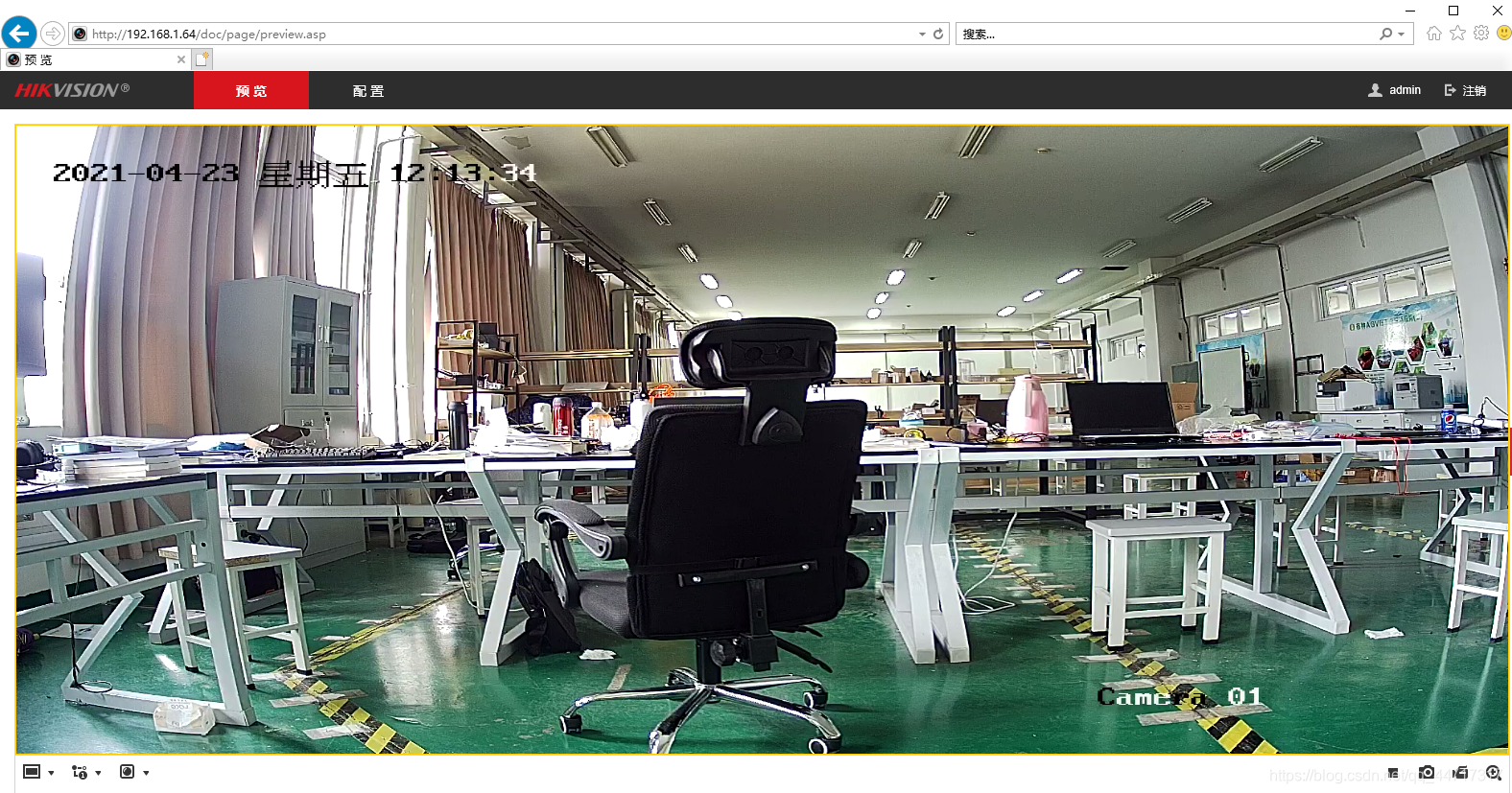
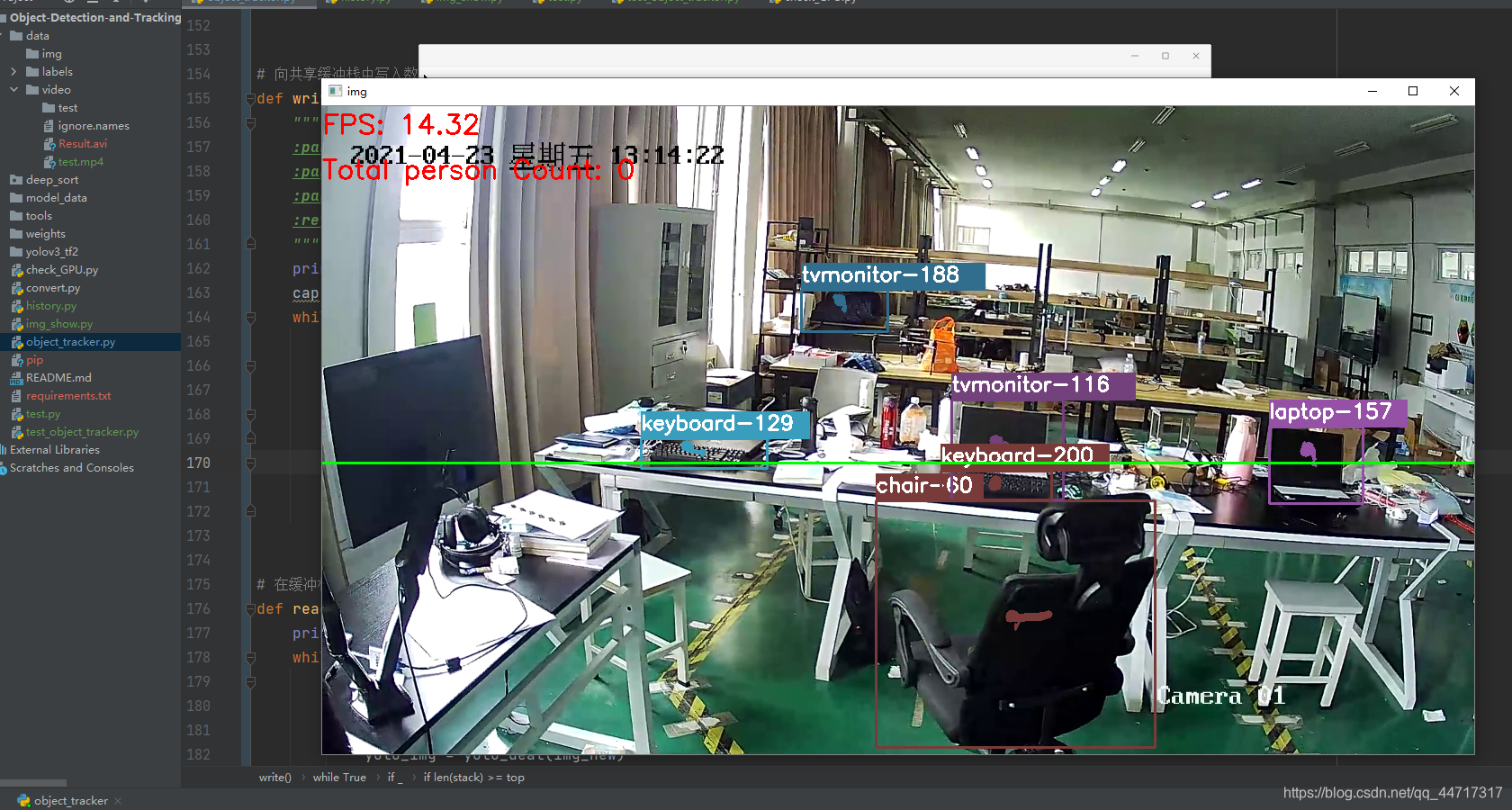
我的毕业设计主要使用YOLOv3+deep-sort实现目标检测与实时跟踪,在这里不做详细的理论介绍,以及具体代码的实现,后面会有相关的博客进行专门系统性的讲述,这里主要讲一种处理内存溢出或者高延迟问题的有效解决方案,在使用模型处理图像之后,每次将处理的画面显示出来,只有三秒的时间(下面为处理后的画面)
然后随后就会发生内存溢出的现象,报错内容如下:
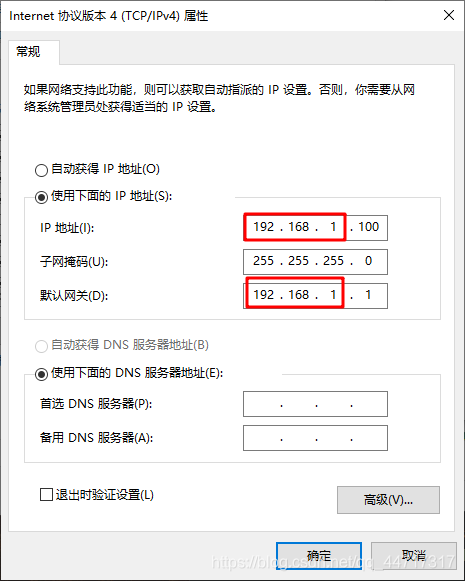
但是,当我使用电脑默认的摄像头,就发现非常的流畅,没有内存溢出的现象,这就十分的诡异,然后我猜测是不是因调用rtsp视频流或取得没帧的分辨率多大,导致检测速度过慢,引起传入帧数与处理帧数不对等引起的内存的溢出,但是我尝试减小了分辨率,甚至于获取的帧图像大小比电脑内置摄像头还有小,结果没有任何的改善;
解决这个问题也寻求网上很多解决方案,以下具体结合各位前辈做一下总结:
首先,需要思考,为什么会造成这种现象?有大佬给出这样的解决方案:
FFMPEG Lib对在rtsp协议中的H264 videos不支持?
维基百科:
实时流协议(Real Time Streaming Protocol,RTSP)是一种网络应用协议,专为娱乐和通信系统的使用,以控制流媒体服务器。该协议用于创建和控制终端之间的媒体会话。媒体服务器的客户端发布VCR命令,例如播放,录制和暂停,以便于实时控制从服务器到客户端(视频点播)或从客户端到服务器(语音录音)的媒体流。
FFmpeg 是一个开放源代码的自由软件,可以运行音频和视频多种格式的录影、转换、流功能[1],包含了libavcodec——这是一个用于多个项目中音频和视频的解码器库,以及libavformat——一个音频与视频格式转换库。
这个项目最初是由法国程序员法布里斯·贝拉(Fabrice Bellard)发起的,而现在是由迈克尔·尼德梅尔(Michael Niedermayer)在进行维护。许多FFmpeg的开发者同时也是MPlayer项目的成员,FFmpeg在MPlayer项目中是被设计为服务器版本进行开发。
2011年3月13日,FFmpeg部分开发人士决定另组Libav,同时制定了一套关于项目继续发展和维护的规则
不管怎么说,就是不支持的意思,就是无法实现,我尝试了这位博主的方法,然而并没有解决的问题,效果还是原来的效果,还是三秒,真就是三秒啊~
参考博客:解决Python OpenCV 读取IP摄像头(RTSP等)出现error while decoding的问题
博主代码实现如下:
import cv2
import queue
import time
import threading
q=queue.Queue()
def Receive():
print("start Reveive")
cap = cv2.VideoCapture("rtsp://admin:[email protected]")
ret, frame = cap.read()
q.put(frame)
while ret:
ret, frame = cap.read()
q.put(frame)
def Display():
print("Start Displaying")
while True:
if q.empty() !=True:
frame=q.get()
cv2.imshow("frame1", frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
if __name__=='__main__':
p1=threading.Thread(target=Receive)
p2 = threading.Thread(target=Display)
p1.start()
p2.start()
其实造成内存溢出,主要是由于利用opencv程序调取rtsp视频流时,处理程序要消耗的CPU时间过于长,VideoCapture的read是按帧读取所导致的,解决问题点在于把读取视频和处理视频分开,这样就可以消除因处理图片所导致的延迟。
其实使用多线程当然也可以实现两个动作分开进行,但是为什么几乎没有任何的效果呢?
原因主要是GIL的存在:
维基百科:
全局解释器锁(英语:Global Interpreter Lock,缩写GIL),是计算机程序设计语言解释器用于同步线程的一种机制,它使得任何时刻仅有一个线程在执行。[1]即便在多核心处理器上,使用 GIL 的解释器也只允许同一时间执行一个线程。常见的使用 GIL 的解释器有CPython与Ruby MRI。
在Windows上为Win thread,完全由操作系统调度线程的执行。一个Python解释器进程内有一个主线程,以及多个用户程序的执行线程。即便使用多核心CPU平台,由于GIL的存在,也将禁止多线程的并行执行。
Python解释器进程内的多线程是以协作多任务方式执行。当一个线程遇到I/O任务时,将释放GIL。计算密集型(CPU-bound)的线程在执行大约100次解释器的计步(ticks)时,将释放GIL。计步(ticks)可粗略看作Python虚拟机的指令。计步实际上与时间片长度无关。可以通过sys.setcheckinterval()设置计步长度。
因此,选择使用多进程
- 然后要考虑怎样在两个进程中传参的问题:
- multiprocessing中有Quaue、SimpleQuaue等进程间传参类,还有Manager这个大管家。
- Quaue这一类都是严格的数据结构队列类型
- Manager比较特殊,它提供了可以在进程间传递的列表、字典等python原生类型
- 还要考虑怎样才能达到处理进程可以在读取进程中得到最新的一帧:
- 其实VideoCapture是一个天生的队列,先进先出。如果要达到实时获得最新帧的目的,就需要栈来存储视频帧,而不是队列。
- 这样的话,Quaue这一大类就都没有可能了,肯定不能用它来传参。
- 提到栈突然想到了python的列表,它的append和pop操作完全可以当”不严格“的栈来用。所以顺理成章地multiprocessing.Manager.list就是最好的进程间传参类型。
- 再就是传参栈自动清理的问题,压栈频率肯定是要比出栈频率高的,时间一长就会在栈中积累大量无法出栈的视频帧,会导致程序崩溃,这就需要有一个自动清理机制:
- 设置一个传参栈容量,每当达到这个容量就直接把栈清空,再利用gc库手动发起一次python垃圾回收。这样就不会导致严重的内存溢出和程序崩溃。
import os
import cv2
import gc
from multiprocessing import Process, Manager
def write(stack, cam, top: int) -> None:
:param cam: 摄像头参数
:param stack: Manager.list对象
:param top: 缓冲栈容量
:return: None
print('Process to write: %s' % os.getpid())
cap = cv2.VideoCapture(cam)
while True:
_, img = cap.read()
if _:
stack.append(img)
if len(stack) >= top:
del stack[:]
gc.collect()
def read(stack) -> None:
print('Process to read: %s' % os.getpid())
while True:
if len(stack) != 0:
value = stack.pop()
img_new = img_resize(value)
yolo_img = yolo_deal(img_new)
cv2.imshow("img", yolo_img)
save_img(yolo_img)
key = cv2.waitKey(1) & 0xFF
if key == ord('q'):
break
if __name__ == '__main__':
q = Manager().list()
pw = Process(target=write, args=(q, url, 100))
pr = Process(target=read, args=(q,))
pw.start()
pr.start()
pr.join()
pw.terminate()
实时画面如下:
存入视频帧:

nice!
项目实现后续系统讲述…
# Channels: 实时数据
# 1: 通道
cap = cv2.VideoCapture(rtsp://admin:[email protected]/main/Channels/1)
print (cap.isOpened())
while cap.isOpened():
success,frame = cap.read()
cv2.imshow(frame,frame)
cv2.waitKey(1)
我这里整理了一份完整的学习思维以及Android开发知识大全PDF。当然实践出真知,即使有了学习线路也要注重实践,学习过的内容只有结合实操才算是真正的掌握。《互联网大厂面试真题解析、进阶开发核心学习笔记、全套讲解视频、实战项目源码讲义》点击传送门即可获取!《互联网大厂面试真题解析、进阶开发核心学习笔记、全套讲解视频、实战项目源码讲义》点击传送门即可获取!
利用ffmpeg从rtsp视频流中解码h264,之后编码mjpeg给到算法推理。同时还要发送到rtmp服务器进行预览。在解码h264的时候会卡住不动,经查大部分的人说法是丢包导致视频帧错误,从而解码错误,并且在解码慢,读取rtsp视频快的情况下会发生阻塞,也会导致这个问题。解决办法就是采用多线程,rtsp流读取视频帧,解码h264,发送rtmp服务器为一个线程。mjpeg编码为另一个线程。线程间用队列进行frame的传送。...
[h264 @ 000000000ef76940] cabac decode of qscale diff failed at 84 17
[h264 @ 000000000ef76940] error while decoding MB 84 17, bytestream 507ffmpeg
ffmpeg解码h264流出错,由于FFMPEG Lib对在rtsp协议中的H264 videos不支...
一方面:如果采取pipeline的模式进行目标识别,先读取数据再识别,会有下面的报错:
[h264 @ 0x55abeda05080] left block unavailable for requested intra mode
[h264 @ 0x55abeda05080] error while decoding MB 0 14, bytestream 104435
目前比较靠谱的一种解释是“FFMPEG Lib does not support H264 videos
解决Python OpenCV 读取视频抽帧出现error while decoding的问题1. 问题2. 解决3. 源代码参考
1. 问题
读取H264视频,抽帧视频并保存,报错如下;
[aac @ 00000220b9a07fc0] Input buffer exhausted before END element found
[h264 @ 00000220b9cd0500] error while decoding MB 20 45, bytestream -14
2. 解决
双码流能实现本地和远程传输的两种不同的带宽码流需求,本地传输可以用主码流,能获得更清晰的存储录像,远程传输就因为带宽限制的原因,而使用子码流来获得流畅的图像和录像。,所以处理办法就是自己写两个不同的线程单独去处理接收每一帧的图像,然后另一个线程处理这每一帧的图像。但是直接按上面的方法来读取视频,会出问题,通常都是error while decoding,读不了码流,也就是读到一半就失败。在读取海康相机时,需要使用VideoCapture读取RTSP流协议的内容,而不是通过相机编号直接读取。
使用OpenCV实现实时流媒体处理:RTSP_opencv_demo详解
项目地址:https://gitcode.com/yywbxgl/rtsp_opencv_demo
在现代计算机视觉和多媒体应用中,实时流媒体处理是一个至关重要的领域。RTSP_opencv_demo 是一个开源项目,它基于OpenCV库,实现了从RTSP协议的视频源获取并处理实时视频流的能力。本文将详细介绍该项目,分析其技...