在前两章内笔者详细叙述了如何编译以及加载opencv库,本文将从opencv出发,在linux系统下利用海康工业摄像机的SDK完成基于海康工业相机的opencv开发算法。
包含:
1.海康工业相机的驱动;
2.工业相机的帧格式转换;
本文代码库:
https://gitee.com/C-Qiyao/gig-e_camera
一切缘起笔者在实验室翻箱倒柜喜提一个师兄购买的海康工业 相机,遂对其进行详细了解,发现功能性相比普通摄像头强不少。
产品页面
笔者使用的海康工业相机的型号为MV-CE013-50GC,采用rj45的网线接口来输出视频数据,并不会在系统设备上挂载video设备,所以需要调用海康的驱动来完成视频帧的获取。
MVS软件是为支持海康机器视觉相机产品而开发的软件应用程序,适用于所有海康机器视觉面阵以及线阵相机产品。MVS内我们主要配置摄像头以及利用他的SDK进行开发。
前往
HIKROBOT网站
下载对应系统的MVS安装包
在此笔者使用的是linux系统所以选择linux系统的安装包进行下载
打开下载得到的压缩包,内容如下:
 我们使用的计算机为64位的X86架构,所以在此我们将后缀为x86_64的安装包解压出来,笔者使用的是Debian系的ubuntu操作系统,所以在此解压对应deb安装包。
我们使用的计算机为64位的X86架构,所以在此我们将后缀为x86_64的安装包解压出来,笔者使用的是Debian系的ubuntu操作系统,所以在此解压对应deb安装包。
使用终端或者软件安装器安装该deb包
安装完成之后,读者可能会发现并没有在菜单内找到MVS软件的图标,但是我们可以在/opt路径下找到MVS的文件夹
qiyao@qiyao-Legion-Y9000X-IAH7:/opt$ ls
apps durapps ffmpeg-4.3.tar.gz nvidia zTools
clion deepin-wine6-stable ffmpeg MVS qqmusic
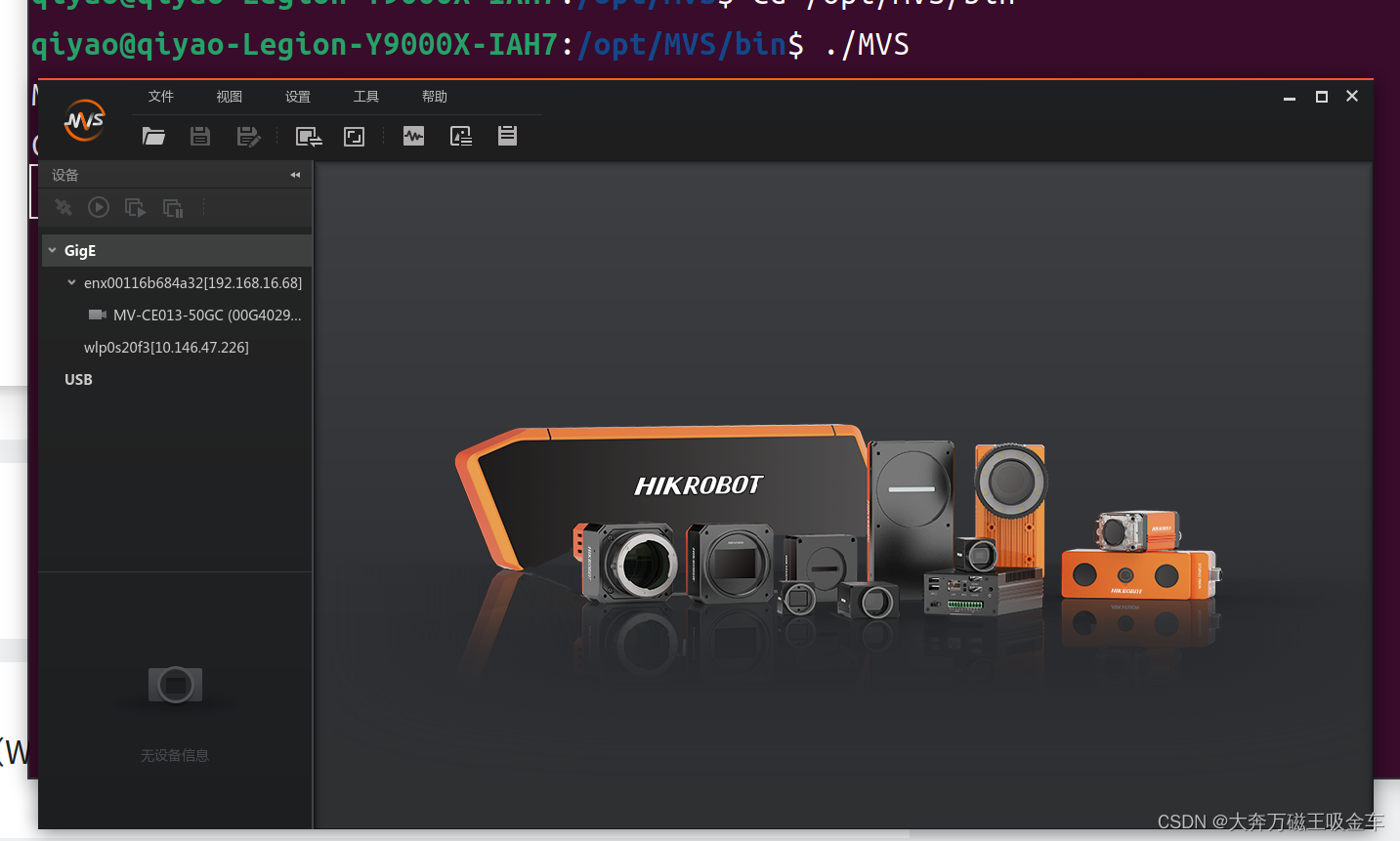
进入MVS文件夹,启动MVS软件
$ cd /opt/MVS/bin
$ ./MVS
成功打开MVS界面
笔者使用的海康摄像头采用rj45接口,查阅手册得知需要使用千兆以太网标准进行连接
设置网卡IP 修改有线网卡ipv4参数为以下内容:
IP: 192.168.16.68
网关: 192.168.16.1
DNS: 202.96.128.166
MTU: 9000
重启MVS软件,在设备列表里选中我们的网络摄像机,右键修改IP(在ip段内随意设置)
双击选中我们的相机,开启相机采集
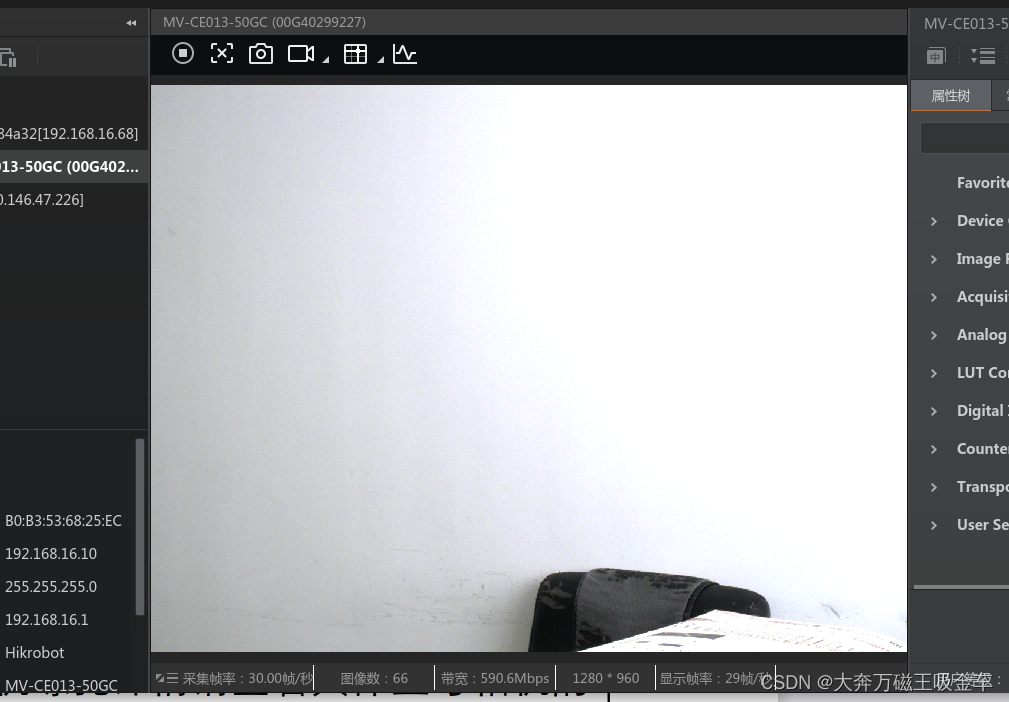
至此,相机和计算机之间的连接以及完成,接下来就需要进行SDK的开发了,同时我们在画面下部的带宽部分也可以发现,该相机的数据流巨大,确实需要依赖千兆网络的支撑。
笔者比较习惯kdevelop的开发,当然也建议读者选择自己钟意的IDE进行软件的开发,毕竟代码才是核心,工具次之,对于狠人用文本编辑器也未尝不可。
拷贝/opt/MVS目录下的 include和lib文件夹到我们的项目文件夹内,与main.cpp同级
本次项目我们需要使用到海康摄像头SDK以及opencv库,笔者在此提供自己的cmakelist
cmake_minimum_required(VERSION 3.1)
set(PROJECT_NAME1 "camera_class_project")
set(CMAKE_BUILD_TYPE "Release")
set(PROJ_DIR "/home/qiyao/codes/camera_class")
project(${PROJECT_NAME1})
find_package(OpenCV REQUIRED)
include_directories(${OpenCV_INCLUDE_DIRS})
message(STATUS "OpenCV library status:")
message(STATUS " config: ${OpenCV_DIR}")
message(STATUS " version: ${OpenCV_VERSION}")
message(STATUS " libraries: ${OpenCV_LIBS}")
message(STATUS " include path: ${OpenCV_INCLUDE_DIRS}")
link_directories("${PROJ_DIR}/lib/64")
include_directories("${PROJ_DIR}/include" "/usr/include/X11" "/usr/include")
link_libraries("${PROJ_DIR}/lib/64/libMvCameraControl.so")
add_compile_options(-std=c++11)
add_executable(${PROJECT_NAME1} main.cpp)
add_library(camera_class SHARED camera_class.cpp)
target_link_libraries(${PROJECT_NAME1} ${OpenCV_LIBS} )
target_link_libraries(${PROJECT_NAME1} -lX11)
target_link_libraries(${PROJECT_NAME1} libMvCameraControl.so)
target_link_libraries(${PROJECT_NAME1} camera_class)
笔者将自己对相机的操作编写成了一个class类,方便自己的调用,读者可以进行参考
camera_class.h
#ifndef CAMERA_CLASS_H_INCLUDED
#define CAMERA_CLASS_H_INCLUDED
#include <stdio.h>
#include <string.h>
#include <unistd.h>
#include <stdlib.h>
#include "MvCameraControl.h"
#include <iostream>
#include "opencv2/core.hpp"
#include "opencv2/imgproc.hpp"
#include "opencv2/highgui.hpp"
#include <opencv2/video/video.hpp>
using namespace std;
using namespace cv;
class camera{
private:
void* handle;
bool g_bExit;
int nRet;
unsigned int g_nPayloadSize;
unsigned char *pDataForRGB;
MV_CC_DEVICE_INFO* pDeviceInfo;
MV_CC_DEVICE_INFO_LIST stDeviceList;
MVCC_INTVALUE stParam;
MV_FRAME_OUT stOutFrame;
MV_CC_PIXEL_CONVERT_PARAM CvtParam;
public:
camera();
void PrintDeviceInfo();
void close_cam();
void start_cam();
void get_pic(Mat * srcimg);
void re_iso();
#endif
camera_class.cpp
#include "camera_class.h"
camera::camera()
nRet = MV_OK;
handle = NULL;
g_bExit = false;
g_nPayloadSize = 0;
pDataForRGB = (unsigned char*)malloc(1280 *960 * 4 + 2048);
memset(&stParam, 0, sizeof(MVCC_INTVALUE));
CvtParam={0};
stOutFrame = {0};
memset(&stOutFrame, 0, sizeof(MV_FRAME_OUT));
void camera::start_cam()
memset(&stDeviceList, 0, sizeof(MV_CC_DEVICE_INFO_LIST));
nRet = MV_CC_EnumDevices(MV_GIGE_DEVICE | MV_USB_DEVICE, &stDeviceList);
if (stDeviceList.nDeviceNum > 0)
for (unsigned
int i = 0; i < stDeviceList.nDeviceNum; i++)
pDeviceInfo = stDeviceList.pDeviceInfo[i];
if (NULL == pDeviceInfo)
break;
PrintDeviceInfo();
}else{
cout<<"Find no Device"<<endl;
unsigned int nIndex = 0;
MV_CC_CreateHandle(&handle, stDeviceList.pDeviceInfo[nIndex]);
MV_CC_OpenDevice(handle);
if (stDeviceList.pDeviceInfo[nIndex]->nTLayerType == MV_GIGE_DEVICE)
int nPacketSize = MV_CC_GetOptimalPacketSize(handle);
if (nPacketSize > 0)
MV_CC_SetIntValue(handle,"GevSCPSPacketSize",nPacketSize);
}else{
cout<<"Warning: Get Packet Size fail"<<endl;
MVCC_ENUMVALUE p={0};
MVCC_STRINGVALUE st;
MV_CC_GetStringValue(handle,"DeviceModelName",&st);
cout<<"DeviceModelName: "<<st.chCurValue<<endl;
MV_CC_GetStringValue(handle,"DeviceVersion",&st);
cout<<"DeviceVersion:\t"<<st.chCurValue<<endl;
MV_CC_GetEnumValue(handle,"DeviceScanType",&p);
if(p.nCurValue==0)
cout<<"DeviceScanType:\t"<<"Areascan"<<endl;
}else{
cout<<"DeviceScanType:\t"<<"Linescan"<<endl;
MV_CC_SetEnumValue(handle, "TriggerMode", 0);
MV_CC_SetEnumValue(handle, "PixelFormat", 0x0210001F);
MV_CC_SetEnumValue(handle, "GainAuto", 1);
MV_CC_SetFloatValue(handle, "Gamma", 0.8);
MV_CC_SetBoolValue(handle, "GammaEnable", 1);
MV_CC_SetEnumValue(handle, "BalanceWhiteAuto", 2);
MV_CC_SetEnumValue(handle, "ExposureAuto", 1);
MV_CC_GetIntValue(handle, "PayloadSize", &stParam);
g_nPayloadSize = stParam.nCurValue;
nRet = MV_CC_StartGrabbing(handle);
if (MV_OK == nRet)
cout<<"Start Grabbing !"<<endl;
cout<<"\nPress ESC to exit.\n";
void camera::PrintDeviceInfo()
if (NULL == pDeviceInfo)
cout<<"null point"<<endl;
if (pDeviceInfo->nTLayerType == MV_GIGE_DEVICE)
int nIp1 = ((pDeviceInfo->SpecialInfo.stGigEInfo.nCurrentIp & 0xff000000) >> 24);
int nIp2 = ((pDeviceInfo->SpecialInfo.stGigEInfo.nCurrentIp & 0x00ff0000) >> 16);
int nIp3 = ((pDeviceInfo->SpecialInfo.stGigEInfo.nCurrentIp & 0x0000ff00) >> 8);
int nIp4 = (pDeviceInfo->SpecialInfo.stGigEInfo.nCurrentIp & 0x000000ff);
cout<<"IP:"<<nIp1<<"."<<nIp2<<"."<<nIp3<<"."<<nIp4<<endl;
void camera::close_cam()
int nRet = MV_CC_StopGrabbing(handle);
if (MV_OK == nRet)
cout<<"Stopped Grabbing !"<<endl;
void camera::get_pic(cv::Mat* srcimg)
MV_CC_GetImageBuffer(handle, &stOutFrame, 400);
CvtParam.enSrcPixelType=stOutFrame.stFrameInfo.enPixelType;
CvtParam.enDstPixelType=PixelType_Gvsp_RGB8_Packed;
CvtParam.nHeight=stOutFrame.stFrameInfo.nHeight;
CvtParam.nWidth=stOutFrame.stFrameInfo.nWidth;
CvtParam.nDstBufferSize=stOutFrame.stFrameInfo.nWidth * stOutFrame.stFrameInfo.nHeight * 4 + 2048;
CvtParam.pSrcData=stOutFrame.pBufAddr;
CvtParam.pDstBuffer=pDataForRGB;
CvtParam.nSrcDataLen=stOutFrame.stFrameInfo.nFrameLen;
MV_CC_ConvertPixelType(handle,&CvtParam);
*srcimg=Mat(stOutFrame.stFrameInfo.nHeight,stOutFrame.stFrameInfo.nWidth,CV_8UC3,pDataForRGB);
cvtColor(*srcimg,*srcimg,COLOR_RGB2BGR);
if(NULL != stOutFrame.pBufAddr)
MV_CC_FreeImageBuffer(handle, &stOutFrame);
void camera::re_iso()
MV_CC_SetEnumValue(handle, "BalanceWhiteAuto", 2);
MV_CC_SetEnumValue(handle, "ExposureAuto", 1);
main.cpp
#include <stdio.h>
#include "opencv2/core.hpp"
#include "opencv2/imgproc.hpp"
#include "opencv2/highgui.hpp"
#include <opencv2/video/video.hpp>
#include <opencv2/opencv.hpp>
#include "camera_class.h"
int main()
Mat img;
int key;
camera cam;
cam.start_cam();
while(1)
cam.get_pic(&img);
imshow("test",img);
key=waitKey(1);
if(key==27)
cam.close_cam();
break;
可谓非常的简洁优雅
构建编译测试工程
达到预期目标,成功驱动摄像机
以上就是今天要讲的内容,本文介绍了linux下海康GigE相机在opencv下的使用,同时在代码类里包括了相机参数调整和帧格式的转换操作,笔者有空再进行详细地阐述。
操作系统:Windows 10 1903 18362.778
相机型号:MV-CA020-10GM
相机软件:MVS_SDK_V3_2_0_VC90_Runtime_190626,MVS_STD_3.1.0_181229
软件版本:Qt 5.12.8, vs2017 Community
通信方式:GigE - 千兆以太网通信协议
驱动与SDK
开发包和驱动下载地址
提取码:2hhn
安装驱动和开发包完成
操作系统:Windows 10相机型号:海康相机软件:MVS_SDK_V3_2_0_VC90_Runtime_190626,MVS_STD_3.1.0_181229软件版本:Qt 5.12.10,Qt Creator 4.13.1 (Community)通信方式:GigE - 千兆以太网通信协议。
1、概述:工业相机SDK是用于控制相机的一个独立组件,支持获取实时图像数据、配置参数、对图像进行后续处理等功能。工业相机SDK兼容GigE Vision协议、USB3 Vision协议、Camera Link协议、CoaXPress协议,目前支持Windows、Linux、Mac以及Android系统,不同的操作系统下需要加载使用配套的SDK版本并参考相应SDK开发指南。SDK对相机的控制上,最基...
电脑网卡开启巨帧,本实验使用海康威视工业相机GigE通讯,带宽要求高,需要网卡开启巨帧。打开软件,软件左侧会扫描到电脑实际连接的相机,更改IP地址与电脑在同一个网段。安装MVS后,会自动添加环境变量路径,方便使用其提供的SDK二次开发。解决方案管理器中,右键-配置工程属性C/C++ 常规-附加包含目录。解决方案管理器中,右键-配置工程属性链接器 常规-附加库目录。解决方案管理器中,右键-配置工程属性链接器 输入-附加依赖项。按Ctrl+F5调试,如下图,说明通过相机采图并处理成功。
文章转载:python语言下使用opencv接口cv2.VideoCapture()接口调用海康机器人工业相机
一、Opencv接口
使用 opencv 的官方接口 VideoCapture() 接口直接调用海康工业相机,
接下来简单介绍下 VideoCapture() 这个接口
接口:cv2.VideoCapture()
作用:获取本地目录下的视频文件或者使用本电脑的摄像头获取实时数据;
本文需要使用该接口调用海康工业相机;
参数写入 “0” ,调用的是本地电脑摄像头
参数写入 “1” ,调用的

