OriginBot
OriginCar
智能车竞赛
ROS探索总结
ROS2探索总结
ROS入门教程
ROS
建图导航
运动控制
自动驾驶
机器视觉
机器学习
建模仿真
机器人学
ROS2入门教程
硬件电路
创客DIY教程
智能机器人创意大赛
ROS史话36篇
学习笔记
ROS2
技术前沿
行业资讯
古月居社区公告
RDK开发套件
机械臂控制
嵌入式开发
Linux
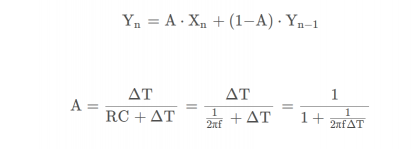
理论推导
产生测试信号
sin_cal.c
sin_cal.h
生成波形
一阶滤波器
FirstOrderFilter.c
FirstOrderFilter.h
测试
低通滤波器
高通滤波器
IAP15W4K58S4
Keil uVision V5.29.0.0
PK51 Prof.Developers Kit Version:9.60.0.0
串口示波器:Vofa+ 1.3.10
低通滤波器
见
一阶RC低通滤波器的数学模型及算法实现 —— 奔跑的chanchanchan
高通滤波器
见
一阶RC高通滤波器详解(仿真+matlab+C语言实现)—— 小麦大叔

#include "sin_cal.h"
#include <math.h>
void sin_Init(sin_Type *Sin, float f, float delta_ms)
Sin->angle = 0;
Sin->delta = 2 * 3.141592653589793f * f * delta_ms / 1000.f;
Sin->out = 0;
float sin_cal(sin_Type *Sin)
Sin->angle += Sin->delta;
if (Sin->angle > 6.283185307179586f)
Sin->angle -= 6.283185307179586f;
Sin->out = sin(Sin->angle);
return Sin->out;
#ifndef __SIN_CAL_H__
#define __SIN_CAL_H__
typedef struct
float angle;
float delta;
float out;
} sin_Type;
void sin_Init(sin_Type *Sin, float f, float delta_ms); //f为设定的频率,delta_ms为时间间隔
float sin_cal(sin_Type *Sin);
#endif
//...
sin_Type Sin_1, Sin_2;
//...
sin_Init(&Sin_1, 1, 5); //1 Hz的正弦波
sin_Init(&Sin_2, 25, 5); //25 Hz的正弦波
//...
定时器中断周期为1ms,每5ms输出一次数据
extern sin_Type Sin_1, Sin_2;
/********************* Timer0中断函数************************/
void timer0_int (void) interrupt TIMER0_VECTOR
static int count = 0;
float Data;
if(++count >= 5)
count = 0;
sin_cal(&Sin_1);
sin_cal(&Sin_2);
Data = Sin_1.out+Sin_2.out;
printf("%f\r\n", Data);
如图,生成了1Hz和25Hz的混合波形:
#include "FirstOrderFilter.h"
void fof_Init(fof_Type *fof, float f, float delta_ms, char HPForLPF)
fof->in_old = 0;
fof->out = 0;
fof->type = HPForLPF;
fof->a = 2 * 3.141592653589793f * f * delta_ms / 1000.f;
if(!HPForLPF)
fof->a = 1.f / fof->a;
fof->a = 1.f / (1.f + fof->a);
float FirstOrderFilter(fof_Type *fof, float in)
if(fof->type)
fof->out = fof->a * fof->out + fof->a * (in - fof->in_old);
fof->in_old = in;
fof->out = fof->a * in + (1 - fof->a) * fof->out;
return fof->out;
#ifndef __FOF_H__
#define __FOF_H__
typedef struct
float a;
float in_old;
float out;
char type;
} fof_Type;
void fof_Init(fof_Type *fof, float f, float delta_ms, char HPForLPF); //f为截止频率,delta_ms为时间间隔,HPForLPF为类型选择
float FirstOrderFilter(fof_Type *fof, float in);
#endif
//...
fof_Type fof_1, fof_2;
//...
fof_Init(&fof_1, 1, 5, 0); //低通滤波器,截止频率为1Hz
fof_Init(&fof_2, 25, 5, 1); //高通滤波器,截止频率为25Hz
//...
extern fof_Type fof_1, fof_2;
extern sin_Type Sin_1, Sin_2;
/********************* Timer0中断函数************************/
void timer0_int (void) interrupt TIMER0_VECTOR
static int count = 0;
float Data;
if(++count >= 5)
count = 0;
sin_cal(&Sin_1);
sin_cal(&Sin_2);
Data = Sin_1.out+Sin_2.out;
printf("%f, %f, %f\r\n", Data, FirstOrderFilter(&fof_1, Data), FirstOrderFilter(&fof_2, Data));
下图为滤波效果
截止频率外的25Hz的信号经滤波已衰减至0.040
高通滤波器
截止频率外的1Hz的信号经滤波已衰减至0.039

