

技术门户
技术门户
机器视觉系统剖析
概述
尽管每个机器视觉系统的主要组件都是相机,但如果没有以下所有组件,任何机器视觉系统都是不完整的:
机器视觉系统中的每个组件在实现系统的总体目标方面都扮演着重要的角色,即帮助机器通过观察外部世界做出更好的决策。 实现此目的需要对组件进行有序定位,以便可以促进从光捕获到传输和处理数字图像的信息流。
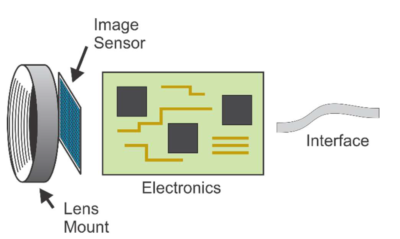
下图显示了每个组件的位置。 图像中提到的每个组件在下面详细讨论。
照明
当相机捕捉物体的图像时,它真正做的是捕捉物体反射的光。 光被吸收或反射的程度取决于物体的表面是透明的、半透明的还是不透明的。
为了确保相机能够捕获分析所需的所有细节,机器视觉系统需要配备适当的照明。 根据光源的位置、角度、反射性质和色谱,可以使用各种用于机器视觉系统中工程照明的技术。 这些都是:
镜头是一种通过聚焦进入场景的光线来放大场景的设备。 简单来说,镜头就是让相机看清外面的世界。 相机看到的场景被认为是 焦点 如果边缘看起来很锋利并且 失去重点 如果边缘显得模糊。 这里需要注意的是,机器视觉相机中使用的镜头通常具有固定焦距或可调焦距,而消费类相机(例如 DSLR 和傻瓜相机)中使用的镜头具有自动对焦功能。 视角 (AoV), 视场 (FoV), 物距、焦距、光圈和光圈值是对镜头进行分类时经常使用的一些术语。 以下是对这些术语的简要解释:
视角 (AoV) 是指可以通过镜头看到的区域的角度范围(以度为单位)。 AoV 是所有镜头的规格,它是通过使用兼容的传感器尺寸将镜头聚焦到无限远而得出的。 对于给定的镜头和传感器尺寸,AoV 是恒定的。
视野 (FoV) 是指可以通过镜头看到的区域的矩形范围,但 FoV 取决于焦距和物距。 FoV 描述了在特定焦距下捕获的内容,而不是在 AoV 的情况下将镜头聚焦到无限远。
光圈是镜头的开口,它控制到达传感器的光量。 光圈的大小通过其 F 制光圈值来衡量。 较大的 F 制光圈值意味着较小的光圈开口,反之亦然。
1. Entocentric / Endocentric 镜头 – 这些镜头具有固定焦距,是机器视觉相机中最常用的镜头。
2. 微距镜头 – 微距镜头旨在实现高放大倍率,它们通常在 05 倍至 10 倍的放大倍率范围内工作。
3. 远心镜头 – 远心镜头没有成像角度,并创建垂直视图 现场。
一个包含镜头卡口、图像传感器、处理器、电力电子和通信接口的保护壳就是机器视觉中所说的相机。
任何相机的核心都是一个图像传感器,可将入射光(光子)转换为电信号(电子)。 图像传感器包括 暴露数组称为 “光电二极管”充当势阱,将来自光子的电磁能转换为微电压。 然后将该电压传递给 输出数字值的模数转换器 (ADC)。 市场上的图像传感器可以根据物理结构(CCD/CMOS)、像素尺寸(区域扫描/线扫描)、色度类型(彩色/单色)、快门类型(全局/滚动)、光谱( UV/SWIR/NIR) 和光的偏振。
每个光电二极管上 传感器 对应于数字图像的一个像素。 光电二极管与模拟值相关联,而图像像素与数字值相关联。 像素是数字图像中的最小元素,并且 是“图片元素”的缩写。 分辨率、强度、曝光、增益和帧速率是与数字成像相关的一些基本概念,将在下面讨论。
数字图像概念
通用串行总线(USB)
CoaX出版社
Camera Link 和 CLHS
机器视觉相机内部的处理器通常是嵌入式处理器或 运行特定型号固件的现场可编程门阵列 (FPGA)。 该固件负责从图像传感器读取像素值、实现图像传感器功能、处理像素数据以创建完整图像、应用图像增强算法以及与外部设备通信以输出完整图像。
相机内部的处理器是 受限 至 最小化功耗 d 减少热量的产生。 因此,在处理非常高的帧速率并同时输出经过处理的图像时,它的处理能力受到限制。 要对来自帧速率非常高的传感器的大量图像数据进行后期处理,最好将这些数据发送到外部系统进行处理,而不是使用相机处理器的资源。 图像后处理中使用的各种系统有:
机器视觉相机负责捕获图像并将其发送到主机 PC,而运行在主机 PC 上的成像软件则负责:
机器视觉中的三类成像软件是:
任何速度、任何分辨率、任何电缆长度。 适用于所有应用的高速相机。