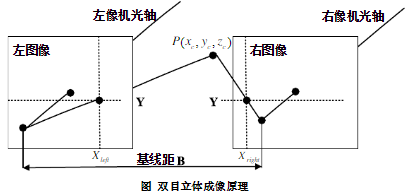
在OpenCV中,f的量纲是像素点,Tx的量纲由定标棋盘格的实际尺寸和用户输入值确定,一般总是设成毫米,当然为了精度提高也可以设置为0.1毫米量级,d=xl-xr的量纲也是像素点。因此分子分母约去,z的量纲与Tx相同 图2解释了双摄像头获取空间中某点三维坐标的原理。 可以看到,实际的坐标计算利用的都是相似三角形的原理,其表达式就如同Q矩阵所示。
空间中某点的三维坐标就是(X/W, Y/W, Z/W)。 因此,为了精确地求得某个点在三维空间里的距离,我们需要获得的
参数
有焦距f、视差d、摄像头
中心
距Tx。 如果还需要获得X坐标和Y坐标的话,那么还需要额外知道左右像平面的坐标系与立体坐标系中原点的偏移cx和cy。其中f, Tx, cx和cy可以通过
立体标定
获得初始值,并通过
立体校准
优化,使得两个摄像头在数学上完全平行放置,并且左右摄像头的cx, cy和f相同(也就是实现图2中左右视图完全平行对准的理想形式)。而
立体匹配
所做的工作,就是在之前的基础上,求取最后一个变量:视差d(这个d一般需要达到亚像素精度)。从而最终完成求一个点三维坐标所需要的准备工作。
在清楚了上述原理之后,我们也就知道了,所有的这几步:标定、校准和匹配,都是围绕着如何更精确地获得f, d, Tx, c
x
和c
y
而设计的。
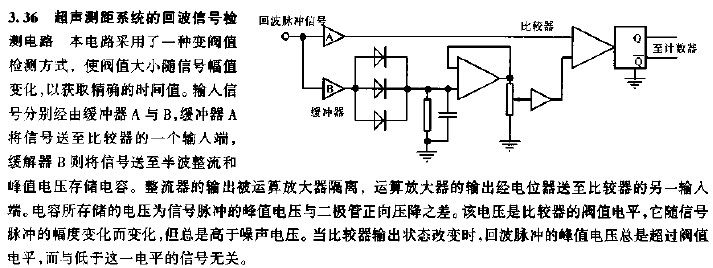
双目测距的原理就说到这里,为了避免大家看到大段纯叙述性的文字头晕,下面的行文将会以FAQ的形式围绕着实现双摄像头测距过程中碰到的几点疑惑展开。当然,其中的解答也只是我的个人理解,如有不当,敬请指正。
Q1:标定时棋盘格的大小如何设定,对最后结果有没有影响?
A:当然有。在标定时,需要指定一个棋盘方格的长度,这个长度(一般以毫米为单位,如果需要更精确可以设为0.1毫米量级)与实际长度相同,标定得出的结果才能用于实际距离测量。一般如果尺寸设定准确的话,通过立体标定得出的Translation的向量的第一个分量Tx的绝对值就是左右摄像头的中心距。一般可以用这个来验证立体标定的准确度。比如我设定的棋盘格大小为270 (27mm),最终得出的Tx大小就是602.8 (60.28mm),相当精确。
Q2:通过立体标定得出的Tx符号为什么是负的?
A:这个其实我也不是很清楚。个人的解释是,立体标定得出的T向量指向是从右摄像头指向左摄像头(也就是Tx为负),而在OpenCV坐标系中,坐标的原点是在左摄像头的。因此,用作校准的时候,要把这个向量的三个分量符号都要换一下,最后求出的距离才会是正的。 但是这里还有一个问题,就是Learning OpenCV中Q的表达式,第四行第三列元素是-1/Tx,而在具体实践中,求出来的实际值是1/Tx。这里我和maxwellsdemon讨论下来的结果是,估计书上Q表达式里的这个负号就是为了抵消T向量的反方向所设的,但在实际写OpenCV代码的过程中,那位朋友却没有把这个负号加进去。(一家之言,求更详细的解释)
Q3:cvFindS
te
reoCorrespondenceBM的输出结果好像不是以像素点为单位的视差?
A:在OpenCV2.0中,BM函数得出的结果是以16位符号数的形式的存储的,出于精度需要,所有的视差在输出时都扩大了16倍(2^4)。其具体代码表示如下: dptr[y*dstep] = (short)(((ndisp - mind - 1 + mindisp)*256 + (d != 0 ? (p-n)*128/d : 0) + 15) >> 4); 可以看到,原始视差在左移8位(256)并且加上一个修正值之后又右移了4位,最终的结果就是左移4位 因此,在实际求距离时,c
vR
eprojectTo3D出来的X/W,Y/W,Z/W都要乘以16 (也就是W除以16),才能得到正确的三维坐标
信息
Q4:利用双摄像头进行测距的时候世界坐标的原点究竟在哪里?
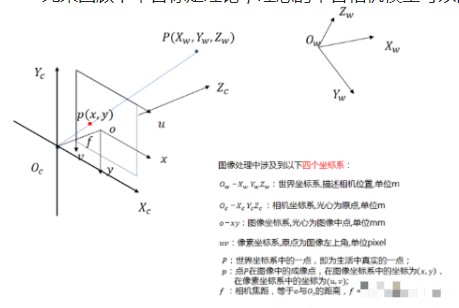
A:世界坐标系的原点是左摄像头凸透镜的光心。 说起这个,就不得不提到针孔模型。如图3所示,针孔模型是凸透镜成像的一种简化模型。当物距足够远时(远大于两倍焦距),凸透镜成像可以看作是在焦距处的小孔成像。(ref: http://bak1.beareyes.com.cn/2/lib/200110/04/20011004006.htm)
图3. 针孔模型 在实际计算过程中,为了计算方便,我们将像平面翻转平移到针孔前,从而得到一种数学上更为简单的等价形式(方便相似三角形的计算),如图4所示。
图4. 针孔模型的数学等价形式 因此,对应图2就可以知道,世界坐标系原点就是左摄像头针孔模型的针孔,也就是左摄像头凸透镜的光心
Q5:f和d的单位是像素,那这个像素到底表示什么,它与毫米之间又是怎样换算的?
A:这个问题也与针孔模型相关。在针孔模型中,光线穿过针孔(也就是凸透镜中心)在焦距处上成像,因此,图3的像平面就是摄像头的CCD
传感器
的表面。每个CCD传感器都有一定的尺寸,也有一定的分辨率,这个就确定了毫米与像素点之间的转换关系。举个例子,CCD的尺寸是8mm X 6mm,分辨率是640X480,那么毫米与像素点之间的转换关系就是80
pi
xel/mm。 在实际运用中,我们在数学上将这个像平面等效到小孔前(图4),这样就相当于将在透镜中心点之前假设了一块虚拟的CCD传感器。
Q6:为什么cvStere
oR
ec
ti
fy求出的Q矩阵cx, cy, f都与原来的不同?
A:这个在前文有提到过。在实际测量中,由于摄像头摆放的关系,左右摄像头的f, cx, cy都是不相同的。而为了使左右视图达到完全平行对准的理想形式从而达到数学上运算的方便,立体 校准所做的工作事实上就是在左右像重合区域最大的情况下,让两个摄像头光轴的前向平行,并且让左右摄像头的f, cx, cy相同。因此,Q矩阵中的值与两个instrinsic矩阵的值不一样就可以理解了。
实验结果:
实验下来,虽然Block Matching
算法
本身对精度有所限制,但测距基本能达到能让人接受的精度,结果如下图5所示
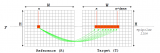
图5. OpenCV双摄像头测距结果 上图中,中、左、右三个物体分别被放在离摄像头50cm, 75cm和90cm的位置。可以看出测距的结果相当不错。当然,上面这幅图是比较好的结果。由于BM算法的限制,同一点云中相同距离的点一般会有正负2厘米之内的误差。 图6是利用双目摄像头测物体长宽的结果,可以看出结果似乎不太准确。。。
图6. OpenCV双摄像头测边长结果 其中,物体宽为117-88=29mm,但实际宽度为5.2cm,物体高位71-13=58mm,但实际高度为13cm。这方面的误差还是比较难以理解 此外,还有一个问题至今尚未完全理解,就是双目摄像头的中心距,为什么采用Tx而不是T向量的长度。因为如果要左右视图重合区域最大化的话两个摄像头的光轴都要与T垂直才是(如图7),这样的话,校正后两个摄像头的中心距应该是T才对。不知道我这样的理解对不对?
图7. 双摄像头立体校准俯视图
编辑:黄飞
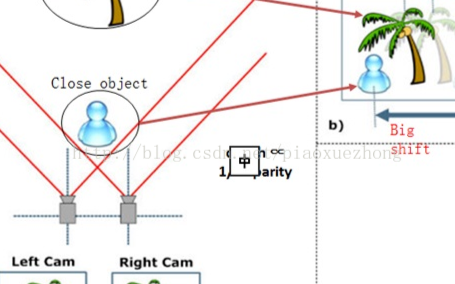
上图中的人和椰子树,人在前,椰子树在后,最下方是
双目
相机
中的成像。其中,右侧
相机
成像中人在树的左侧,左侧
相机
成像中人在树的右侧,这是因为
双目
的角度不一样。
2022-09-26 09:37:44
 6538
6538
其使用的算法复杂。被动
测距
按照使用的视觉传感器数量可分为单目视觉、
双目
立体视觉和多目视觉三大类。 (1)单目视觉 单目视觉是指仅利用一台照
相机
拍摄一张相片来进行测量。因仅需要一台
相机
,所以该方法
2020-12-01 15:08:04
双目
测宽仪是基于机器视觉原理及模拟人的双眼进行宽度尺寸自动测量的仪器,是一种高度自动化的工业实时在线宽度
检测
仪表。
双目
测宽仪是一种智能化的全自动工业在线实时宽度
检测
设备,两个工业
相机
就像人的双眼
2023-12-04 17:10:35
实用化,不仅将成为工业
检测
、生物医学、虚拟现实等领域的关键技术,还有可能应用于航天遥测、军事侦察等领域。目前在国外,
双目
体视技术已广泛应用于生产、生 活中。
双目
立体视觉是计算机视觉的一个重要分支,单从
2013-11-21 16:20:51
将成为工业
检测
、生物医学、虚拟现实等领域的关键技术,还有可能应用于航天遥测、军事侦察等领域。目前在国外,
双目
体视技术已广泛应用于生产、生 活中。
双目
立体视觉是计算机视觉的一个重要分支,单从
双目
2013-11-21 16:22:03
双目
立体视觉(BinocularStereoVision)是机器视觉的一种重要形式,因其可简单地利用左右摄像机中的图像信息计算得到
相机
视野中物体相对于摄像机的
深度
信息使得该技术拥有广泛的应用前景
2021-12-23 07:19:52
高速
相机
对目标位进行摄像,充当人的双眼的功能,然后通过系统软件处理,可以确定任意物体的三维轮廓,还可以得到轮廓上任意点的三维坐标。基于
双目
立体视觉这种强大的技术功能,不但在军事科研上有所运用,如航天遥测
2016-03-03 09:36:59
对液体、固体的穿透本领很大,尤其是在阳光不透明的固体中,它可穿透几十米的
深度
。超声波碰到杂质或分界面会产生显着反射形成反射成回波,碰到活动物体能产生多普勒效应。因此超声波
检测
广泛应用在工业、国防
2018-11-12 16:16:45
9 Applications of Deep Anomaly Detection
深度
异常
检测
的应用9.1 Intrusion Detection9.2 Fraud Detection9.3
2021-07-12 09:18:14
相机
包带加厚肩带 摄影包
相机
包电脑包减压弹力单肩带 背带金属扣
2023-03-28 13:03:52
://mp.weixin.qq.com/s/kcecV6PNE92FB8ugSoV4tw
双目
立体视觉系统使用两只
相机
同步采集图像,通过像素匹配获得
深度
图像,进而获取三维点云,系统结构如下。用下图来解释
双目
视觉的基本原理:图中所示变量为
2020-03-02 17:03:12
挑战,包括激光雷达、单目
测距
和
双目
视觉技术等。在当前的高级辅助驾驶技术(ADAS)中,
双目
视觉技术在距离
检测
方面表现出色,它可以精确地测量物体的距离,提供更客观的数据。
为了应对这一需求,设计了一种
2023-12-19 18:02:07
电脑接了个CREVIS的USB
相机
,在计算机的图像设备里能
检测
到,驱动也装好了,但是NIMAX的设备和接口里只有电脑自带的摄像头,缺测不到外接的
相机
。这是什么问题?
2017-06-08 22:57:30
看电赛论文中,总结到只要用到避障,基本上都用到ST178或ST188,可是当我们查看器件手册时,发现他的
检测距
离只有十几毫米,这在现实中如何用呀!在网上查了一些资料,没有看到可提高
检测距
离的资料,坛子上也搜了,没有找到,有经验的前辈希望指点,谢谢
2014-04-29 08:43:42
深度
相机
根据其工作原理可以分为哪几种?其有哪些区别?
2021-07-01 10:03:56
目前我们想做一个产品,把USB的
相机
(
相机
需求单独驱动)的数据在
相机
模块端转成以太网数据,通过以太网cable连接到电脑上,有几个问题想请教:用哪颗芯片软件端是否有成熟方案是否支持Win,Linux,嵌入式等多平台速率多少?USB2.0还是能到3.0小白问题,先感谢大牛回答!
2022-09-29 08:16:09
`labview在
检测
PCBA插件的错、漏、反等缺陷中的应用
检测
原理通过高精度彩色工业
相机
不停板实时抓取板卡图像,采取卷积神经网络算法处理图像,智能判定元器件不良。采用最新的
深度
学习算法对电容,光耦,二极管等训练模型,能兼容不同pcb板,不同环境。`
2021-07-13 15:27:47
扫地机器人这样服务机器人是不可能使用的。另外也有其他的方案,比如
双目
景深
相机
,TOF景深
相机
,结构光景深
相机
,这几种景深
相机
有相同的地方也有不同的地方,其中
双目
景深
相机
的硬件结构最简单,只需要两个cmos
2017-11-12 21:37:42
内核, 主频可达1GHz, 可大大提高视觉处理的效率项目描述:该项目是五子棋机器人研发的一部分, 通过
双目
摄像头
检测
出五子棋的位置, 测算出其全场坐标, 然后移动过去抓取棋子
2015-08-09 07:48:55
是左右
相机
拍摄同一块圆形标定板的图像,并根据labview自带的圆点标定板圆点
检测
函数得到圆点坐标。下图是加载圆点标定板标定结果后,加载一对图像后,鼠标移动到左图上显示的距离信息。程序框图分3部分
2021-09-27 16:52:18
用,那因为两个平面平行是否可以根据相似三角形 来求解,只是因为距离的改变而比例改变,这时就需要
检测距
离3,LabVIEW2014里面有一个set simple calibration VI,需要输入像素
2016-05-20 15:49:27
ABSTRACT1.基于
深度
学习的异常
检测
的研究方法进行结构化和全面的概述2.回顾这些方法在各个领域这个中的应用情况,并评估他们的有效性。3.根据基本假设和采用的方法将最先进的
深度
异常
检测
技术分为
2021-07-12 06:36:22
异常
检测
的
深度
学习研究综述原文:arXiv:1901.03407摘要异常
检测
是一个重要的问题,在不同的研究领域和应用领域都得到了很好的研究。本文的研究目的有两个:首先,我们对基于
深度
学习的异常
检测
2021-07-12 07:10:19
识别和
测距
,完成FCW(前方碰撞预警)等ADAS功能。
双目
视觉
测距
的基本原理并不复杂,如图2所示,P为目标点,它在左右两个
相机
(镜头中心分别为A和B)上的成像点分别为E和F,则P点在两个
相机
中的视差为d
2017-08-12 15:15:52
嗨,我买了一台D435
相机
。我想要校准D435
相机
与其他设备的相对位置,所以我需要测量D435的RGB
相机
和
深度
相机
之间的相对位置以便进一步完成工作。所以我想问这是否确实得到了一个确切的参数或方法
2018-11-27 14:16:59
宽厚板材在线测宽,可采用
双目
测宽仪,如果采用平行光
检测
法,有可能会因为倾斜导致测量不准,因此采用
双目
测宽仪进行宽度尺寸的
检测
。
双目
测宽仪测量原理
在利用
相机
测量宽度时,由于单个
相机
在成像时存在“近
2023-11-20 17:25:38
双目
测宽仪是机器视觉原来制造而成的智能宽度
检测
设备,广泛应用于板材类产品的宽度
检测
。通过测宽仪的使用,实时了解产品宽度品质,进行超差提示,减少废品的生产。
双目
测宽仪优势
测量软件界面显示:产品规格
2023-11-28 17:13:06
都会有所要求。但是,灵敏度越高,噪声的影响就会越大,因此,在选择高灵敏度
相机
时,还需要了解
相机
是否具有较高的信噪比;6、
检测
需求。例如:
检测
环境、
检测距
离、
检测
目标物的运动状态、
检测
工具的体积要求等
2014-03-26 15:25:46
中,应用
双目
立体视觉来进行的热点方向很多,采用维视图像专门针对
双目
立体视觉优化定制的系列
双目
工业
相机
研发的立体视觉系统应用实例有以下四大方面:1、农业方面:牛羊等活体动物体尺测量,植物生长过程三维监控
2016-01-19 16:59:12
D130S型3D
相机
采用主动式
深度
感知技术,它采用激光光源和MEMS微振镜模组作为投影模组,将可编码的条形结构光投射于物体之上,并由成像设备采集并传输给计算单元,生成点云图像。即其原理为通过在成像
2022-01-29 13:40:52
D130型3D
相机
采用自主研发的MEMS结构光技术,结合红外激光光束实现光栅动态结构光投射,通过高速CMOS拍摄条纹畸变,采用三角
测距
原理实现高精度三维信息采集。该型号3D
相机
在
2022-03-21 16:16:04
D132型3D
相机
采用自主研发的MEMS结构光技术,结合红外激光光束实现光栅动态结构光投射,通过高速CMOS拍摄条纹畸变,采用三角
测距
原理实现高精度三维信息采集。该型号3D
相机
在
2022-06-15 14:44:13
介介绍:D300型
深度
相机
采用主动式
深度
感知技术,它以DLP投影仪作为结构光投射器,将可编码的条纹结构光投射于物体之上,并由成像单元采集并传输给计算单元,生成点云数据。产品特征: 蓝光LED光源
2022-12-14 11:27:02
本文详细介绍了ADS7852的工作原理及其应用,并给出了它与89C51及TCD2901D的连接电路图。说明了
双目测距
的原理并给出了
测距
的求解公式。利用ADS7852的特点解决了
双目测距
中激光光斑
2010-08-03 17:02:40
 40
40
超声
测距
系统的回波信号
检测
电路
2009-04-22 19:33:13
881
笔者设计了一种基于AVR单片机的激光
测距
机综合性能
检测
设备,借助该设备,对不同型号的激光
测距
机完成
测距
精度
2010-10-08 17:14:54
1675
激光
测距
能力
检测
方法
2011-01-07 17:03:37
48
双目
视觉是利用机器视觉进行障碍物
检测
的研究热点。针对
双目
视频不同步,导致立体匹配不精准的问题,提出了一种基于图像处理的
双目
校准算法。算法首先根据道路的先验特征模型,建立视觉校准的敏感区域,以减小
2015-12-18 16:26:57
34
Xilinx FPGA工程例子源码:基于FPGA实时处理的
双目测距
系统
2016-06-07 15:07:45
37
电子开发机器人相关教程资料——全自主机器人
双目
视觉运动
检测
2016-09-06 16:42:43
0
今天,小蚁正式发布了旗下的
双目
VR全景
相机
,这是目前能买到的最便宜的高像素全新
相机
之一。
2017-06-05 20:44:43
3510
激光
测距
机模拟信号处理器不能利用多个脉冲之间的相关信息,所以目标
检测
能力有限。而激光
测距
机数字信号处理器可以利用多个脉冲之间的相关信息。目标匹配和跟踪算法利用多个脉冲之间的相关信息 ,降低了 目标
2017-11-09 14:11:42
10
当前随着3D
相机
在智能机器人领域的广泛运用,越来越多的学者投入到了基于3D
相机
深度
图像的室内三维平面分割研究当中。文运用了一种快速而且比较稳定的方法去
检测
复杂的平面,其中
深度
图像是运用Kinect
2017-11-16 10:10:12
4
垛钢带上的特征点进行距离约束,选取适量的特征点作为最终特征点,利用特征匹配到的角点坐标点和
双目测距
公式计算获得铝锭垛的位姿信息。
2017-11-24 09:47:44
0
摘要: 为了确保激光
测距
机的性能,首先需要进行性能
检测
。在分析传统激光
测距
性能
检测
时因受位置和天气条件的限制,故提出了模拟激光
测距
机的工作原理和激光传输过程的思路,研究了一个实现该思路的方案
2018-01-19 01:21:01
203
双目
立体测量的特点类似于“
双目
导航、定位”,一般来说:第一、需要提取的点不多,仅把被测物需要测量部分的点找到即可;第二、速度要求较高,一般要求一秒中测量多个产品;第三、对光照环境要求高。因为测量的时候
相机
和被测物必然有相对位移,所以拍摄到的图像可能各个角度都会有。
2018-01-23 11:32:53
22024
进行处理后得到距离的测量方式。视觉
测距
是被动
测距
中一个比较重要的分支,主要分为单目式
测距
、
双目
式
测距
以及结构光
测距
。
双目
视觉
测距
测量精度高,但是算法复杂,运算时间长,特征匹配难,工作环境要求严苛,因此,其研究
2018-02-08 11:49:44
0
6月27日,MYNTAI(小觅智能)正式发布公司旗下
双目
硬件系列新品——小觅
双目
摄像头
深度
版
2018-07-05 16:40:25
8218
机器人创新生态获悉小觅智能CEO庞琳勇博士获邀出席了“MWCS世界移动大会·上海 2018服务机器人核心技术与人工智能创新发展论坛”,于论坛现场正式发布了公司旗下
双目
硬件系列新品——小觅
双目
摄像头
深度
版(MYNT EYE Depth)。
2018-07-24 17:46:30
5036
在这篇论文中,我们介绍了ActiveStereoNet,这是主动
双目
立体成像系统(active stereo systems)的第一个
深度
学习解决方案。由于缺乏ground truth,我们的方法
2018-07-29 10:17:54
10238

本届WRC,MYNTAI小觅智能首次以视觉识别技术软硬件解决方案提供商的身份参展,会上同时展出了小觅
双目
摄像头标准版(MYNT EYE Standard)和小觅
双目
摄像头
深度
版beta两款
深度
相机
(以下简称S版和D版)。
2018-08-29 15:51:28
6618
由于传统的激光
测距
性能
检测
必须到室外对目标靶进行
检测
,并且受到天气条件的限制,使得技术普查和日常维护受到很大的制约。为了克服以上问题,一种基于AVR单片机的激光
测距
机综合性能
检测
设备,借助该设备
2019-02-06 09:17:00
2605

在Apollo生态系统的大家庭里,在物流、工程等作业场景也得到了创新应用。会上,李彦宏还宣布了另一个量产“惊喜”——搭载中科慧眼
双目
双焦
相机
的新石器无人作业车也已量产下线了。
2018-09-04 17:30:37
6332
随着科学技术的不断发展,在
测距
领域也先后出现了激光
测距
、微波雷达
测距
、超声波
测距
及红外线
测距
等方式。
2019-01-02 14:28:01
5125
针对动车( CRH)车身尺寸范围大、
检测
项目复杂、车型变化多,不容易实现在线测量的难题,首先提出了大型动车车身关键尺寸的测量方案,利用
双目
电荷耦合装置( CCD)立体视觉建立各个关键尺寸的视觉测量
2019-01-03 11:10:06
4
小觅
双目
深度
相机
系列产品,均采用“
双目
+IMU”的惯性导航核心硬件方案组合,内置六轴IMU传感器,利用
双目
和IMU数据的互补性,能为视觉以及空间移动算法的研发提供数据校正,IMU与图像的同步精度高
2019-01-14 15:07:18
4356
众所周知,自动驾驶、动作捕捉等场景非常依赖
双目
立体
相机
采集图像、位姿信息的清晰度、丰富度,单位时间内
双目
相机
提供的信息越多,越有利于相关场景的算法追踪及定位,降低算法开发难度。 正因如此,为了满足
2020-03-21 15:43:34
812
自动驾驶、动作捕捉等场景非常依赖
双目
立体
相机
采集图像、位姿信息的清晰度、丰富度,单位时间内
双目
相机
提供的信息越多,越有利于相关场景的算法追踪及定位,降低算法开发难度。
2019-04-11 18:21:13
2941
在
双目
相机
领域是非常煎熬和纠结的,煎熬来自哪里呢?
2019-07-11 16:39:19
5748
视觉的CCD
测距
技术。
双目
立体视觉的基本原理是模仿人眼与人类视觉的立体感知过程,从两个视点观察同一景物,以获取不同视角下的感知图像,通过三角测量原理计算图像像素间的位置偏差,以获取景物的三维信息。一个完整的CCD
测距
系统通
2019-11-26 12:05:39
6
据外媒报道,微软已申请了一项被称为“
深度
多光谱”
相机
的专利。该专利有望用于未来的Surface设备上,包括Surface Duo和Neo。据介绍,微软研发的这项多光谱
相机
在某些方面要胜过苹果的TrueDepth
相机
。
2019-12-16 11:21:19
2373
1.1.
双目
视觉简介
双目
视觉广泛应用在机器人导航,精密工业测量、物体识别、虚拟现实、场景重建,勘测领域。 什么是
双目
视觉?
双目
视觉是模拟人类视觉原理,使用计算机被动感知距离的方法。从两个或者
2020-10-23 09:51:57
10867
先说一下单/
双目
的
测距
原理区别: 单目
测距
原理: 先通过图像匹配进行目标识别(各种车型、行人、物体等),再通过目标在图像中的大小去估算目标距离。这就要求在估算距离之前首先对目标进行准确识别,是汽车
2020-11-05 10:07:39
4875
上一期小编给大家介绍了TOF 与
双目
结构光的对比,那在
深度
相机
的应用方案种还有结构光的摄像方案。今天小编就跟大家来聊一聊结构光,顺便也捋一捋这三者的对比。 结构光 结构光技术就是使用提前设计好的具有
2020-11-19 14:37:19
2893
这几天把基于opencv C++ api将鱼眼镜头的
双目
标定以及
测距
功能实现完毕,效果还可以,至少对齐得非常棒。 这里把其流程及其关键函数在这...
2020-12-08 22:11:06
939
双目
摄像头标定是
测距
及其三维建模非常重要的步骤,因为标定出来的内外参数将会用来对原始图像进行反畸变校正,而反畸变的效果对立体匹...
2020-12-08 22:27:24
546
为改善单目图像语义分割网络对图像
深度
变化区域的分割效果,提出一种结合
双目
图像的
深度
信息和跨层次特征进行互补应用的语义分割模型。在不改变已有单目孪生网络结构的前提下,利用该模型分别提取
双目
左、右输入
2021-03-19 14:35:24
20
,最简单的单目成像是基于小孔成像的原理,三维空间中的点经过透视投影过程映射到图像平面上,如此一来在透视线上的空间点都落在像平面上的同一点处。 所以普遍认为单目
相机
缺乏
深度
信息无法
测距
。(这里仅从成像原理出发,当然现
2021-04-26 13:36:39
3497
前言
双目
立体视觉,由两个摄像头组成,像人的眼睛能看到三维的物体,获取物体长度、宽度信息,和
深度
的信息;单目视觉获取二维的物体信息,即长度、宽度。 1)
双目
摄像头 常见的
双目
摄像头有以下几款: 能看
2021-04-26 14:19:43
8965
在这里我们所说的
双目
标定是狭义的,讲解理论的时候仅指两台
相机
之间相互位置的标定,在代码实践的时候,我们才说完整的
双目
标定。
2021-07-04 11:04:16
10836
以下四个示例设计演示了如何使用OptiSystem模拟光
检测
和
测距
系统(LIDAR),具体如下:
2021-09-09 13:54:55
1703
说到
相机
,大家都不陌生了,如今基本上人手一台
相机
或能拍照的手机。而在很多人不怎么涉足和了解的工业生产领域,工业
相机
在产品生产和
检测
过程中起到了举足轻重的作用。今天就由昊天宸小编为大家介绍工业
相机
2021-12-24 15:51:28
1337
双目
摄像头标定是
测距
及其三维建模非常重要的步骤,因为标定出来的内外参数将会用来对原始图像进行反畸变校正,而反畸变的效果对立体匹...
2022-01-25 20:04:56
2
深度
相机
也具备普通
相机
的一些不足,容易受视差影响:包括黑色物体(特征点少)、透明物体(光的穿透)、光滑物体(光反射太强)、图像无纹理(特征点少)、过度曝光(特征点少)等。
2022-03-11 13:38:57
11752
机器视觉可代替人眼对物体进行
检测
和识别,较为常见的是利用单目摄像头。若要获取物体的
深度
信息,仅凭单目摄像头是不完善的,通常情况下需选择
双目
摄像头来获取物体三维信息。
2022-04-07 09:42:44
2123
奥比中光iToF和结构光新品
相机
,今日联袂上线!6月13日,奥比中光发布Femto W与Persee+
深度
相机
,进一步完善智能视觉产品线。
2022-06-14 10:41:38
1691
奥比中光iToF和结构光新品
相机
,今日联袂上线!6月13日,奥比中光发布Femto W与Persee+
深度
相机
,进一步完善智能视觉产品线。Femto W是奥比中光基于iToF智能视觉平台研发的高性能
2022-06-14 11:17:24
1323
深度
信息恢复是计算机视觉领域的一个重要研究内容。使用传统的光学成像系统对不同距离的物体成像时,需要机械移动会造成图像放大率变化,导致
深度
测量产生误差。近年来,电控调焦的液晶透镜光学成像系统已实现对焦、变焦、
深度
测量等功能,利用液晶透镜光学成像系统进行
双目
立体视觉
深度
测量可以扩张
双目
深度
测量范围。
2022-06-14 13:43:18
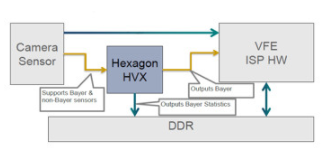
2266
使用神经网络解决方案(图 1),我们可以使用 HVX 模块同时对两个
相机
图像进行边缘
检测
过程。一个
相机
上的边缘
检测
图像使用反馈指针传递给另一个
相机
。
2022-06-22 15:34:32
559
双目
标定和普通
相机
的标定一样,其标定时不仅标定出两个
相机
的内参,还要标定出两个
相机
之间的关系。因此,在进行
双目
标定时,需要使两个
相机
对同一标定板进行多次取图,分别标定出各自的内参和相对于标定板的外参,然后便可计算出两
相机
位置间的关系:
2022-10-10 17:25:31
1009
的python3.6的虚拟环境) yolov5模型版本:YOLO v5s
双目
摄像头间距:12cm
双目
摄像头焦距:100度/3mm
双目
摄像头输出分辨率为:2560*720。
2022-10-18 14:23:25
3
以下四个示例设计演示了如何使用OptiSystem模拟光
检测
和
测距
系统(LIDAR),具体如下:
2022-11-18 11:10:39
1274
简单来说,基于
双目
立体视觉的
测距
类似人类的双眼,和基于TOF、结构光原理的
测距
不同,它不对外主动投射光源,完全依靠拍摄的两张图片( RGB 或者灰度图)来计算距离。
2022-11-18 14:21:28
4207
ST散斑
双目
不仅采用了创新的红外投射技术,还结合立体匹配算法,在保障三维重建精度,具备极强的抗环境光干扰能力的同时,成像最快仅需0.23 s,以高速节拍赋能高效生产。
2022-11-24 15:18:30
1542
双目
当然可以算视差和
深度
了,即使没有
检测
出障碍物(因为有附加的
深度
信息,
检测
器会比单目好),也会报警。问题是,
双目
视觉系统估计视差没那么容易,立体匹配是计算机视觉典型的难题,基线宽得到远目标
测距
准,而基线短得到近目标
测距
结果好,这里是存在折衷的。
2022-12-20 16:16:35
408
在这里我们所说的
双目
标定是狭义的,讲解理论的时候仅指两台
相机
之间相互位置的标定,在代码实践的时候,我们才说完整的
双目
标定。
2022-12-28 17:17:24
1978
视觉引导的室内搬运或者无人配送这种场景,有没有合适的
深度
相机
或
双目
相机
推荐?
双目
相机
的算力要求有多高啊?TOF和结构光
相机
适合这种场景吗?
2023-01-04 10:14:31
1546
由于摄像头摆放的关系,左右摄像头的f, cx, cy都是不相同的。而为了使左右视图达到完全平行对准的理想形式从而达到数学上运算的方便,立体 校准所做的工作事实上就是在左右像重合区域最大的情况下。
2023-03-06 14:59:04
1283
双目测距
的原理就说到这里,为了避免大家看到大段纯叙述性的文字头晕,下面的行文将会以FAQ的形式围绕着实现双摄像头
测距
过程中碰到的几点疑惑展开。
2023-04-26 16:47:37
3406

输入数据来源可以是单目视觉
相机
、
双目
视觉
相机
,数据可以是灰度图或者彩色图。
基于单目图片的称为单目车道线
检测
技术,基于
双目
图片的称为
双目
车道线
检测
技术。
2023-06-01 14:18:32
0
,本次展位号:W1馆1368。
此次参展,维视智造将围绕
深度
视觉系统解决方案、多
相机
并行
检测
、超高速视觉
检测
、视觉引导定位、超高精密测量、线扫高速
检测
6大应用
2021-03-09 10:26:24
1073

高光谱
相机
(Hyperspectral Imaging, HSI)是一种具有非常高光谱分辨率的成像技术。它能够捕获到一个物体的大量光谱特征,从而对物体进行深入的物理或化学属性分析。在烧伤
深度
检测
2023-06-30 11:59:55
363

首先,课程介绍了
双目
相机
标定的基础知识。我了解到
双目
相机
是由两个
相机
组成的系统,通过同时拍摄目标物体的两个视角来获取三维信息。
2023-07-03 14:25:06
1922

在
深度
相机
的主流技术方案Structure Light,ToF,Stereo Dual)中,主动
双目
成像方案可以基于低成本的硬件,获得高分辨率、高精度的
深度
图像,但是立体匹配算法(stereo
2023-07-04 11:33:51
1524
电子发烧友网站提供《FPGA
相机
边缘
检测
开源分享.zip》资料免费下载
2023-07-10 09:39:59
0
相机
硬件产品。 奥比中光Gemini 2入选中国信通院“铸基计划” Gemini 2 是一款搭载了奥比中光全新
深度
引擎芯片MX6600的
双目
结构光3D
相机
,搭载三种
深度
工作模式,可为多种应用场景提供高质量的
深度
数据。它提供宽广的视野,
深度
图像测量范围可达0.15 - 10m,集
2023-07-28 10:04:01
752
Gemini 2 是一款搭载了奥比中光全新
深度
引擎芯片MX6600的
双目
结构光3D
相机
,搭载三种
深度
工作模式,可为多种应用场景提供高质量的
深度
数据。它提供宽广的视野,
深度
图像测量范围可达0.15 - 10m,集成辅助点
测距
功能,可实现最远10m范围内零盲区
深度
测量。
2023-07-29 10:58:46
521

够构建一个可以
检测
、分析和响应人体运动的应用程序和系统。代码我们的演示视频如下,该视频展示了这项技术的实际功能。您可以看到使用虹科AI
深度
相机
实现人体姿势估计是多
2023-07-31 17:42:26
553

双
相机
道路
检测
方案解决传统道路
检测
难题 目前国内道路
检测
常用的单
相机
检测
方案在一些特殊情况下,如遇到裂缝平行于路面方向,路面特殊材质或高吸光率,路面存在凹凸等情况,会产生漏拍裂缝或裂缝
2023-12-14 11:40:57
已全部加载完成

